



.jpg)



当前位置:首页»案例
- 物位测量传感器的选型设计与应用
-
企业: 控制网 日期: 2003-12-08 领域: 工厂信息化 点击数: 1687 梁国建
1 概述
随着自动控制高新技术的发展,连续式物位测量传感器在电站、石化、油田等工业领域得到广泛的应用。固体颗粒、灰粉和泥浆混合物的料(液)位测量,特别是非接触式连续测量一直是物位测量技术的难题,应用在火力发电厂“飞灰/底渣岛”灰库、脱水仓料位检测的问题更加突出。它始终存在粉尘粘性大、温度偏高、介电常数小等问题。如何合理选型设计好适用于电厂灰库、脱水仓的新型物位测量传感器已成为关键。物位测量传感器作为一种特殊的测量传感器可测量不同介质的物位势能。它在PLC/DCS系统接口中有着非常重要的地位。
物位测量传感器分为两大类:一类是测量物位连续变化的传感器;另一类是测量以状态为目标的开关式传感器(即物位开关)。前者主要用于连续控制的料仓、灰库等,有时也可用于多点报警系统;后者主要用于顺序控制的限位,报警等。下面主要介绍三种连续式物位测量传感器。
2 三种新型连续物位测量传感器的原理、功能特点、PLC接口技术的分析比较
2.1 雷达测量传感器
(1) 原理
雷达测量应用“发射-反射-接收”测量原理。雷达传感器的天线以波束的形式发射最小5.8GHz的雷达信号,反射回来的回波信号仍由天线接收;雷达脉冲信号从发射到接收的运行时间与测量传感器到介质表面的距离以及物位成比例。如图1所示,一束雷达脉冲的发射时间为1ns,每隔277ns天线系统发射一束脉冲信号。脉冲波束的频率是3.6MHz,在发射间隔时间内,天线系统作为接收装置使用;传感器分析处理运行时间小于十亿分之一秒的回波信号,并在极短的一瞬间分析处理回波图。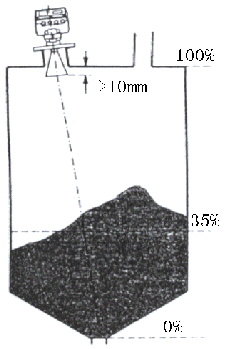
图1 雷达物位测量原理图
(2) 功能特点
雷达传感器连续,非接触测量传感器探头到介质表面的距离。不同的距离对应不同的物位。应用特殊的“调整间隔时间”技术,将每秒3 600 000个回波图放大、定位,然后分别进行整合、判断,每0.1秒精确地分析处理这些被放大的回波信号,节省分析频率的时间。雷达信号是一种特殊形式的电磁波,其物理特性与可见光相似。根据量子论观点:雷达信号可以穿透空间,传播速度相当于光速。
雷达信号是否可以被反射,取决于两个因素:① 被测介质的导电性;② 被测介质的介电常数。所有导电的介质都能很好地反射雷达信号,即使介质的导电性不是很好,也能被很准确地测量。雷达测量传感器可以测量所有介电常数>1.5的介质(空气的介电常数是1)。介质的导电性越好或介电常数越大,回波信号的反射效果越好。
(3) 分析处理
① 智能自动
雷达测量传感器采用先进的电子部件,测量效率很高。能够探测到比十亿分之一还短的雷达信号运行时间,还将多年的物位及雷达测量技术应用于智能信号分析处理。
它的参数可以被调整并存储在一个记忆存储器里。内置一个数据库支持此记忆存储器,数据库内有多年来雷达物位测量的经验参数。与人类记忆相似,数据库的记忆是长期记忆,历史存储器相当于短时记忆,雷达信号的图片相当于瞬时记忆。
② 计算概率
德国VEGA公司的雷达传感器ECHOFOX®按照计算概率的方法(模糊逻辑)连续快速计算和判断哪些回波图是正确的,并且每0.1秒重新给出物位。基于两个数据库的数据和实际的回波图,测量传感器在很短的时间内作出决定。标有ECHOFOX®的测量传感器可以根据经验参数辨别有用回波和虚假回波,并将虚假回波滤出。
(4) 输出信号与PLC的接口
测量传感器的信号输出和传输十分重要。有两种输出。
① 与物位成比例的0/4~20mA模拟信号
0/4~20mA模拟信号是一种通用的标准信号,适用于设计单点模拟量测量或PLC/DCS系统。
② 与测量值成比例的数字型信号
数字型信号传输适用于大型测量系统,带数字型输出的传感器可以任意联网。一根两芯线缆上可以连接5~15个传感器(数字型输出)。
数字型输出的特点是测量精度高,误差小。
(5) 应用场合
雷达式测量传感器不受温度、压力、气体等条件的限制和影响,可无接触、精确地测量不同介质的物位,主要应用于灰粉、固态颗粒、高温等各种工况,安全且节省能源。在实际应用中,雷达料位的发射功率非常小,通过金属容器外壁可以将雷达信号完全隔离(静电屏蔽)。
2.2 相位跟踪测量传感器
(1) 原理
相位跟踪法是通过测量发送RF(Radio Frequency)射频波与从物料表面反射回波之间的相位角来测量物位的。如图2所示,RF波是在一根垂直悬挂在料仓内的传输线(即传感元件)中传播的。发送RF波与反射波之间的相移是RF波沿传输线向料面移动,然后再返回顶部时所走过的距离直接度量。该测量方法取决于物料的性质,与介电常数无关。
图2 相位跟踪测量原理图
(2) 功能特点
料仓测量过程与物料性质无关,这是解决多年物料测量难点的重大突破。因为按相位跟踪原理,其测量的是物料上面空间的高度,而不是物料本身,所以与物料无关。料位测量的结果不取决于料仓内电容或导电率的物理特性;介电常数的变化仅改变Rx(反射信号)的幅值,而不改变Tx(输入信号)与Rx之间的相位。因此,利用这个测量原理可以在介电常数变化的条件下工作。另外,因为充满粉尘的空气和粘附在探头的物料,它们所占据的空间,与探头周围的测量空间相比是微不足道的,故加料过程中的粉尘及因温度变化而引起的介电常数的变化、料仓的结构,如高度、直径等这些固体料测量中的干扰均不会影响相位跟踪法的测量精度。RF波本身的检测特点决定相位跟踪物位检测传感器可不受罐内温度变化、物料被搅拌的影响。
(3) 分析处理
根据公式 :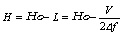 ,
,
H:料仓中料位高度,Ho:料仓总高(探头长度),L:探头顶部到料面的距离,V:速度, :f2与f1的频率差。
:f2与f1的频率差。
因为V是固定的值,可不需现场校准。采用智能传感器控制扫频过程,测出频率(f2,f1),就能自动计算出料仓内的料位高度H。
智能化测量算法采用自校核技术。用PCBUS诊断软件进行RS232C数据口通迅,提供就地指示、控制接点、4~20mA输出及2个串行数据器,可分别供RS232/RS485使用。
(4) 应用场合
不需对温度及压力进行补偿。因射频波可以固定的速度在真空、空气中传播,它不受温度、压力、灰尘的影响。相位跟踪需要的能量很小,它的本质是安全的。
2.3 超声波跟踪测量传感器
(1) 原理
其原理是工作时向液面或粉体表面发射一束超声波,被其反射后,测量传感器再接收此反射波。如图3所示,设声速一定,根据声波往返的时间就可以计算出测量传感器到液面(粉体表面)的距离,即测量出液面(粉体表面)位置。其传感元件有两种,一种是由线圈、磁铁和膜构成的,另一种是由压电式磁质伸缩材料构成的。前者产生10kHz的超声波,后者产生20~40kHz的超声波。超声波的频率愈低,距离的衰减愈小,但反射效率也小。
图3 超声波测量原理图
(2) 功能特点
非接触式超声波物位测量系统由两部分组成:一个超声波信号换能器和一个远距离安装的电子发收器。换能器不断发射一系列的超声波脉冲并接收自被监测的液体或固体表面返回的反射回波。发收器中的微处理器将信号转换成距离、物位或体积,并将此数据作为LCD数字读数显示。
超声波换能器具有内藏式温度补偿和高输出的特点,可提高自清洁能力。采用可增强换能器灵敏度的动态阻抗匹配(完美的发射/接收匹配)以使回波幅度达到最大。
在理想条件下,监测一个容器中的液体或料位,接收来自反射表面的单个强回波是一个简单的过程。但在实际应用中,来自扰动、粉尘和虚假目标幻影的回波、泡沫、蒸气及因距离产生的声衰减效应等许多因素,使测量工况变得复杂,限制了系统的测量能力。现在的声波智能TM回波处理软件,加上新的换能器,可以弥补以前超声波传感器不能涉足的场合。
(3) 分析处理
① 电子单元中枢,声波智能TM软件使DPL Plus接口和XPL Plus接口具有独特的回波包络线数字化,以区别由固体或液体表面反射的“真正”回波与由容器障碍物和声学或电气噪声产生的虚假回波。
② 人工智能 为适应工况条件变化采用高可靠性处理原始回波包络线的软件,该软件采用曲线成形、统计分析、回波再造和数字滤波器等特殊技术来消除电气干扰和窄回波的影响。由于回波包络线被不断贮存和刷新,包络线的平均化减小了随机声波反射的影响。识别和剔除来自容器障碍物的幻影、焊缝的回波形状、电气尖峰的上升时间、搅拌器叶片的随机声波反射;重新构造因由振动和凹凸不平的表面所引起的破碎回波,确保恶劣环境下的稳定测量。
(4) 输出信号与PLC的接口
① 预设置和微调
DPL Plus和XPL Plus系统出厂前已进行了预设置,满足各种固体和液体应用场合的要求,在现场根据实际的固体或液体中选择,并输入容器尺寸,控制单元即可启动和运行。
② 编程简单
用快速启动软件可进一步对特定的过程“细调”。通过快速编程选择所需的工程单位显示物位、空间、距离或体积,调整对任何仓罐中的物位变化的跟踪速度。在设置和运行时可观察编程值,不必查询它关闭过程或不同显示模式之间的切换;以通讯转换器选件BIC11为两种控制单元提供同样的连接至主机、PLC/DCS系统。
(5) 应用场合
超声波换能器被熔接密封在材料Kynar的外壳中。不同场合应用选择不同材料系列,额定温度范围为-40~150℃,测量距离为10~60m。检测物料以飞灰为例,选择温度范围为-40~95℃,测量距离为10~40m。可满足苛刻的现场工作环境,并在高温、潮湿、粉尘中获得最大的声功率输出。
3 选型设计应用的基本原则
① 应用条件 适应测量液体或固体的物位及到被测介质的距离,发射能量很小,不影响人体安全,可以在真空条件下测量,可以测量所有介电常数>1.5的介质。
② 测量精度 测量分辨率<1mm,量程≥0~35m,精度<0.1%,无温度时间漂移;材质稳定,测量准确。
③ 适应性强 不受噪音、蒸汽、粉尘、混合气体和气体夹层的影响,不受介质密度和温度的影响;非接触测量,耐磨损工作压力≥64bar,介质温度超过1000℃;坚固耐用,耐化学腐蚀。
④ 功能完整 (a) 两线制技术0/4~20mA输出或数字型输出共用同一根两芯线缆;(b) 任意联网,一根两芯线缆上可以连接15个传感器(数字型输出);(c) 可以连接任何符合标准协议通讯口的BUS系统;(d) 测量传感器可带一体式显示,可以单独显示。
⑤ 维护简单 电源合理,调试方便。
4 应用实例
(1) 灰位测量
灰库是暂存飞灰的最后区域,土砼结构,库内存在着高温、潮湿、粉尘粘附等因素。监测灰库灰位的变化有助于整个飞灰系统的正常输送,灰位测量的正确与否是和输灰控制系统构成连锁的关键条件之一。原传统的灰位测量传感器大多为重锤式、电容式,其精度及输出信号虽能够满足与PLC标准接口的要求。但实际应用受一定条件的限制,尤其不适应封闭式灰库的检测,经常发生断锤、埋锤等现象。作者曾参加某4×300MW电厂1#/2#炉细灰库物位测量传感器的技术改进,将射频导纳式测量替代原重锤式测量。其探极由TWFLE材料特制而成,可不受灰库粉尘飞扬粘附的影响,具有拆卸方便、安装灵活等优点。但经过一段时间的试用证明效果并不理想,发现数据漂移严重,甚至在显示上出现“死”数据的现象。后在3#/ 4#炉粗、细灰库分别改用相位跟踪测量和雷达式测量传感器取得了比较理想的效果。现在我厂600MW机组的灰库灰位测量选用MILLTRONICSDE 的Airanger SPL--519单点抗粉尘超声波测量传感器,测量范围在15 m左右,目前使用效果不错。
(2) 脱水仓测量
脱水仓是一个水渣(泥浆)混和物的敞开式容器。以前的设计仅在于对仓内液位变化作简单的测量,其输出信号不参于系统联锁,故这一测量装置仅起报警作用,大多选用重锤式料位测量传感器,应用效果并不理想。而实际真正需测量的是渣位(灰水混合物)的变化。现在改用Sensall4901SL型污泥/泥浆音叉式控制。该传感探头为一不锈钢结构及气密的“C”型传感器。它包含2只超声波变送器,相互分开成规定的间隔,构成超声波系统的发送与接收。当发送的超声波信号通过含有悬浮固态、液态时,比通过清水有较大程度的衰减,通过超声波信号振幅的增加与减小,激活继电器动作,输出信号,激活外部设备(脱水仓放渣门)动作,同PLC构成一个完整的闭环控制,基本能满足工艺要求。
5 结语
选型设计好“飞灰/底渣岛”物位测量传感器是热工自动控制的一个新课题,作者根据多年参加大型火力发电厂“飞灰/底渣岛”建设及检修的工作经验,对“飞灰/底渣岛”物位测量传感器的选型设计提出三条建设性的意见:① 满足工艺要求,适应现场工况条件;② 输出标准信号,接口控制简单;③ 抗干扰能力强,维护方便。结合电厂生产现场应用的工况,全面提高物位测量传感器的检测水平,是清洁发电、安全发电工作获得成功的主要条件。参考文献:
[1] VEGA PULS50 Lever and pressure Operating Instructions, 2000,2.
[2] CELTEK LM-7000 Phase Tracking System Product Description, 1998,7.
[3] MILLTRONICS AiRanger SPL-519 Instruction Manual, 1997,9.
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号