



.jpg)



当前位置:首页»案例
- 实时以太网:I/O层超高速以太网
-
企业: 控制网 日期: 2004-09-27 领域: 工业以太网 点击数: 1711 德国倍福公司
EtherCAT(Ethernet for Control Automation Technology) 是德国倍福(Beckhoff)最新提出的开放式实时以太网。EtherCAT使用了标准的以太网技术并即将公布其协议,因此它确定了网络开放性的新标准。同时,由于它可在30µs内通过双绞线或光纤电缆处理1 000个数字量I/O,从而也确定了实时以太网性能的新标准。EtherCAT为用户在使用网络拓扑结构时提供了选择,即采用传统的、价格更加昂贵的星型拓扑结构或者是采用低成本的总线型拓扑结构―无需昂贵的专用组件。EtherCAT使用的是市场上非常普遍且经济的以太网卡(NIC),而其它的实时以太网则往往需要特殊且昂贵的以太网卡。

图1 EtherCAT
工作原理
EtherCAT突破了其它以太网解决方案的系统限制:不必再像从前那样在每个连接点接收以太网数据包,然后进行解码并复制为过程数据。当报文在设备的持续传送过程中,每个I/O端子中的FMMU(Fieldbus Memory Management Unit)就可以读出该报文中指定到此I/O的数据。同样,输入数据可以在报文通过时插入报文中,报文仅有几纳秒延迟。
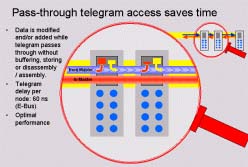
图2 报文传递仅有几纳秒延迟
其它的以太网解决方案不能达到EtherCAT的实时能力。其中一个解决方案通过较高级的协议层禁止CSMA/CD存取过程,并使用时间片或轮询过程来取代它。
另一个以太网解决方案使用专用交换机,并采用精确的时间控制方式分配以太网数据包。这些解决方案只能在某种程度上实现将控制器数据快速而准确的传输至以太网节点。然而,它们由于存在以太网节点到实际I/O或驱动控制器的传输延迟而受到限制。还有一类解决方案在使用模块化 I/O 时,需要一个子总线,就像德国倍福从前所作的那样,利用已有的现场总线,通过同步子总线系统加快传输速度。但是,这样的同步将无法避免通讯总线传输的延迟,德国倍福率先在EtherCAT中使用FMMU前沿技术解决了该问题。
端子实现以太网
德国倍福用于I/O模块的以太骨干网称为E-bus。E-bus将使用不同电信号的I/O点数据传送至下一个I/O点,但不改变以太网数据。第一个以太网节点称为总线耦合器,它可以将电信号通过标准双绞线或光缆变换至E-bus。变换至E-bus的信号可以满足电子端子块的电信号要求。端子块(E-bus)中的信号也可以通过双绞线在短距离内传输(最长10米)。用这种廉价的方式可以对端子块进行扩展。由于以太网数据没有发生变化,其后续的向以太网的变换可以随时进行。
从控制的观点看,控制器的硬件通常采用非常经济而普遍的标准网络接口卡(NIC)。德国倍福提供的这种卡是配备有4个以太网通道的PCI卡。这些接口卡的共同特点是:通过DMA(direct memory access)将数据传送至PC,即网络存取不会占用CPU资源。
这种NIC卡使用TwinCAT Y驱动,实现了与软件操作系统和实时系统的无缝连接。这意味着,TwinCAT Y驱动既是兼容的网络驱动,也是TwinCAT以太网现场总线卡的驱动。通过内部的优先级系统管理,实时系统以太网帧的优先级高于普通操作系统帧。普通的操作系统以太网帧(如打印缓冲池、因特网、电子邮件等)都是在有足够的时间“间隙”时传送的。在接收端,所有接收到的以太网帧都由TwinCAT I/O系统检验,并过滤出那些与实时系统相关的数据,其它帧则在检测之后传递给操作系统。
由于操作系统的以太网功能具备完整性,所有与操作系统兼容的协议都可在同一物理网络下并行工作。这些协议不仅包括一些诸如TCP/IP、HTTP、FTP、SOAP等标准IT协议,还包括所有诸如ModbusTCP、ProfiNet 或EthernetIP等工业以太网协议。
协议
EtherCAT协议在以太网帧内使用了一个特殊的以太类型(Ether type)。这个类型可以使控制数据直接传输至以太网帧内而无须重新定义标准以太网帧。EtherCAT的以太网帧可以由多个子报文组成,每个报文都服务于一个特定的逻辑映像区(Logic process image),该逻辑映像区最大可达4GB。由于数据链独立于物理顺序,因此可以对EtherCAT端子进行任意编址。广播式、多播式和从站间的通讯均可进行。当TwinCAT控制的EtherCAT组件与控制计算机在同一子网时,数据将直接采用以太网帧进行传送。
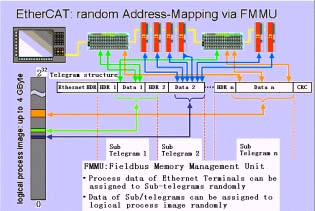
图3 EtherCAT通过FMMU实现随机地址映射
然而,EtherCAT的应用领域不仅仅局限于TwinCAT控制系统,EtherCAT UDP可将EtherCAT协议打包至UDP/IP的报文内。该特性可以使用于任何带以太网协议堆栈的控制寻址EtherCAT系统,甚至允许经路由器跨接其它子网的通讯也成为可能。在这种情况下,系统的性能显然取决于控制的实时性和以太网协议的实现方式。EtherCAT网络本身的响应时间几乎不受限制,UDP报文只须在第一个站点解压包。
性能
EtherCAT使网络性能达到了一个新境界。借助于端子中的EtherCAT ASIC和主站中读取网卡数据的DMA技术,整个协议处理过程都在硬件中进行,因此,它独立于协议椎栈的实时运行系统、CPU性能和软件运行。1 000个I/O的刷新只需30μs,包括端子的循环时间。它可以在一个以太网帧中交换最多达1 468个字节的协议数据,这几乎相当于12 000个数字输入或输出,这些数据的传输仅需300μs。100个伺服轴的通讯也只需100μs,在此期间,可以向所有轴提供设置值和控制数据,并报告他们的实际位置和状态。分布式时钟技术保证了这些轴之间的同步时间偏差小于1μs。
EtherCAT技术的高性能特征可以实现传统的现场总线系统无法实现的控制理念。例如,以太网如今不仅能够处理速度控制,而且也可以处理分布式驱动器的电流(转矩)控制。巨大的带宽资源使状态数据与任何数据并行传输。EtherCAT技术使得通讯技术与现代高性能的工业PC相匹配。总线系统不再是控制理念的瓶颈。分布式I/O的数据传递超过了只能由本地I/O接口才能实现的性能。EtherCAT技术的原理具备扩展性,不束缚于100M带宽,扩展至千兆位的以太网也是可能的。
EtherCAT 替代PCI
由于使用了集成于主板的以太网口,而不再需要附加接口插槽,PC主机体积越来越小,成本也越来越低。随着PC组件小型化的加速发展,工业PC的体积主要依赖于所需要的插槽数目。高速以太网带宽以及EtherCAT通讯硬件(FMMU)数据带宽的利用,确定了接口技术的新方向:即工业PC中的传统接口将转变为EtherCAT系统的高智能接口端子。除分布式I/O之外,轴和控制单元,复杂系统,如现场总线主站、高速串行接口、网关及其它通讯接口都可以被寻址,甚至没有协议变体限制的以太网设备也可以通过分布式“集线器端子”连接。工业PC主机体积越来越小,成本也越来越低,一个以太网接口足以应对所有的通讯任务。
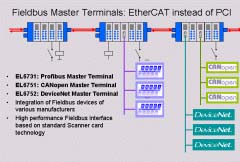
图4 EtherCAT替代PCI
拓扑结构
线型、树型或星型结构:EtherCAT支持几乎所有的拓扑结构。其它现场总线通用的总线型或线型结构在EtherCAT中同样适用。需要的接口已置于耦合器上,而无需再另加集线器,这特别适用于结合了线型、分支型或树型的布线方式。当然,传统的基于交换机的星型以太网拓扑结构也可以使用。
采用不同的传输电缆可以最大限度地发挥布线的灵活性。灵活且低成本的标准以太网电缆可以选择采用以太网模式传输数据(100Base-TX),或者采用E-bus信号处理方式。光纤(PFO)可以用于特殊的应用场合。以太网带宽(如不同的光缆及铜缆)可以结合交换机或媒介转换器使用。
快速以太网或E-bus可以按照距离要求进行选择。快速以太网的物理特性可以使设备之间的距离达到100米,而E-bus只能保障10米的间距。整个网络规模几乎是无限制的,因其可以容纳最多达65 535个设备连接。
分布时钟
精确同步在广泛要求同时动作的分布过程中显得尤为重要,如几个伺服轴在执行同时联动任务时。分布时钟的精确校准是同步的最有效解决方案,如同在新的IEEE1588标准中所叙述的那样。相反地,如果采用完全同步,当通讯出现错误时,同步数据的品质将受到很大影响,在通讯系统中,分步式校准时钟在某种程度上具备错误延迟的容错性。
在EtherCAT中,数据交换是完全基于硬件“主时钟” 和“子时钟”的。因为该通讯使用了一个逻辑的和全双工的快速以太网物理环结构,每个时钟可以简单和准确地确定另一个时钟的实时偏移量。分布时钟基于该值进行调整,这意味着它可以在网络范围内提供信号抖动小于1μs的、非常精确的时钟基。
然而,高性能分布时钟不仅用于同步,而且也可以提供数据采集时本地时间的精确信息。例如,控制经常通过连续测量的位置值计算出速度。尤其是在非常短的采样时间内,在位移测量中,即使是一个很小的随机抖动都会导致速度的极大变化。使用TwinCAT,德国倍福引进了新的、扩展的数据类型(时间戳(timestamp) 数据类型,超采样(oversampling)数据类型)。本地时间与被测值相连接,利用基于以太网的宽带资源,其处理时间可小于10纳秒。因此,速度计算的精确度不再依赖于通讯系统的抖动。这比基于无抖动通讯的测量技术有极大的提高。
热连接
热连接功能能够使网络的各部分相连,并且解耦或重新自由配置;所提供的灵活响应特性,改变了很多应用需要在运行时变更I/O配置的需求。例如,具备变更特性的处理中心、装备传感器的工具系统或者智能化的传输设备、灵活的工件执行器等。EtherCAT系统考虑到了这些需求:任意配置。
诊断
在EtherCAT的研发过程中,特别注重典型的诊断特征。德国倍福广泛的现场总线系统经验表明,有效性和试运行时间主要依赖于诊断的能力。只有当错误被快速而准确地检测出,并且清楚地指明其所在位置时,错误才能被及时的排除。
在试运行期间,将使用该指定的配置检测I/O端子实际配置的连续性。
拓扑结构也要与配置相匹配。因为有内置的拓扑结构识别,I/O可以在系统启动时或通过自动上装配置时进行确认。数据传输过程中的位错误可以通过有效的32位CRC校验码检测到,它使汉明间距(Hamming Check)达到最小值4。EtherCAT协议,传输物理层和拓扑结构使得高品质监控每个独立的传输段成为现实。
总线端子
现有的德国倍福基于K-bus总线的I/O端子可以直接与EtherCAT相连,包括一些配备网络接口、用于模块化I/O端子的相应耦合器。它保证了新老产品的兼容性和可持续性,有效地保护了现有的和未来的投资。
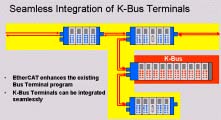
图5 EtherCAT与K-bus的无缝连结
开放性
EtherCAT技术在设计之初就以开放性为其宗旨,它完全与以太网(802.3)兼容:该协议可与其它提供各种服务的以太网协议并存,并且所有的协议都并存于同一物理介质中,通常只会对整个网络性能有很小程度的影响。标准的以太网设备可通过集线器端子连接至一个EtherCAT系统,该端子并不会影响循环时间。配备传统现场总线接口的设备可通过EtherCAT现场总线主站端子的连接集成到网络中。UDP协议变体允许设备整合于任何插槽接口或堆栈中。EtherCAT协议将在作出最后的技术规范后发布。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号