



.jpg)



当前位置:首页»案例
- 自动切破幼小棉苗上方地膜的设备研制
-
企业: 控制网 日期: 2004-10-20 领域: SCADA-RTU 点击数: 1736 王拓 孙天成 蒋志雄 王颖初
1 引言
棉花生产作为我国北方一些地区主要经济支柱之一,种植面积较大,农民在棉花作物的种植过程中广泛使用地膜覆盖技术,即播种棉花种籽的同时,在下种土壤的表面上敷设地膜,在地膜的保护下,棉籽发芽、生长。地膜覆盖技术可以提高土壤温度、保蓄土壤水分、稳定土壤环境、提高光热利用效率和促进作物根系发育,增加植物的生长期,抑制杂草生长,可增产、增收。然而,使用地膜覆盖技术重要的环节之一是在棉苗生长中要对所敷设的地膜适时、适当切破,让棉苗破膜而出继续生长。目前,解决这一问题主要采用季节性雇佣民工,让民工手持刀具,将棉苗上方的地膜划破。这种做法效率极低,不适合规模生产,而且易划伤棉花幼苗造成减产。因此,研制具有高效率的机械切破装备,机械化实现地膜适时、适当切破,让棉苗及时破膜而出茁壮生长亟待解决。
2 自动切破棉苗上方地膜相关问题
2.1 棉苗的识别及位置确定
地膜切破装备必须首先识别并确定棉苗的位置,依据识别出的棉苗及其位置信息控制切破刀具对其上方地膜切破。
由于棉苗上面覆盖一层地膜、棉苗较小,而且对棉苗识别及位置确定是装备在行进中完成,这就要求克服地膜影响,快速、准确地将棉苗从背景(土壤、沙石和杂草)中识别及定位。同时,在识别棉苗并确定其位置信息的过程中不能损伤棉苗。
2.2 杂草问题
由于棉田中不可避免地生长杂草,尤其是存在棉苗与杂草交织在一起的复杂情况,因此需要解决杂草对识别棉苗带来影响。
2.3 切破设备行进状态
① 尽管装备的牵引速度可标定恒速,但是牵引机车和装备行进在棉田中,行驶速度由于棉田中各种因素不能保证它是绝对匀速前进。装备的瞬时速度对地膜的准确切破有一定的影响。因此,控制单元对每株棉苗上方地膜切破进行控制时,需要将装备的行进速度变化因素加以考虑。
② 切破刀具恰好切破棉苗上方地膜为追求目标。但是,装备在行进中的左右摇摆是无法避免的。当左右摇摆的幅度比较大时,将影响准确切破棉苗上方地膜。因此,装备左右摇摆因素要加以处理。
③ 切破刀具随着装备行进有上下跳动发生。如果跳动方向向下,切破瞬间则可能伤及棉苗,如果跳动方向向上,切破瞬间则可能没有切破地膜。
2.4 地膜上面灰尘问题
地膜上散落的灰尘对测量设备准确测量出棉苗位置有一定的影响,尤其是我国西北地区近几年来沙尘暴在春季时有出现,消除灰尘影响是一个必须考虑的问题。
2.5 地膜表面凹凸问题
由于天气、敷设技术、棉田地表平整程度以及地膜本身等因素,所敷设的地膜不可能像镜面一样平直,即所敷设的地膜局部上有凹凸,这种凹凸会导致切破刀具切不着地膜。
2.6 切破工具
切破地膜的刀具有多种,考虑到成本和工作速度,采用高温烫的方案。即通过一定的电压加热电阻丝,使它恰好达到能烫破地膜的温度,在需要切破的位置,让电阻丝快速接触地膜而达到切破目的。在一些地段让电压升高,使地膜的残渣溶掉,保证切口质量。
3 自动切破棉苗上方地膜装备结构
针对上述问题,考虑技术和成本的因素以及方案必须避免影响棉花的生长,采用机器视觉技术来识别棉苗及其位置信息。即通过摄像设备采集棉田中棉苗的图像信息,然后由图像处理系统对采集到的图像进行特征分析以识别棉苗、棉苗位置并将这些信息传递给的控制单元,控制单元综合棉苗位置、装备行进状态,产生对伺服机构的驱动完成对地膜恰当切破。装备由检测单元与控制单元两部分组成,其结构框图如图1所示。
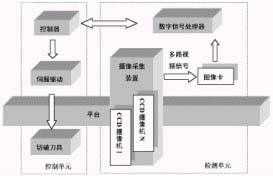
图1 自动切破棉苗上方地膜装备结构图
对于装备在行进中的上下跳动问题通过对装备的适当配重加以解决。对地膜表面上凹凸问题,通过装备上的负压将工作面上的地膜上吸5~10mm,切破后自动释放地膜。在装备上设置光源,利用光源可以增强捕获棉苗图像的特征信息,避免采集时光线不够造成的图像模糊。
系统选用813D彩色摄像机与8mm自动光圈镜头,镜头规格为1/3”,光阑指数F1.2;采用CG300图像采集卡,该卡有4路输入,支持PAL、NTSC彩色/黑色视频输入。图像分辨率PAL制最高为768*576*24位,NTSC制最高为640*480*24位。
4 棉苗的检测识别和定位子系统
棉田视频信息通过图像采集卡输入DSP后通过图像处理软件对棉苗进行识别定位。对棉苗识别的准确度与效率将直接影响到装备对地膜切破的精确度和工作效率。
4.1 棉苗检测识别定位
图像处理软件模块框图如图2所示。

图2 图像处理软件模块框图
(1) 采集卡设置模块
该模块利用采集卡提供的二次开发库对采集卡视频输入的制式、亮度、对比度、通道进行初始化设置。根据算法需要的时间来选择视频输入制式。
(2) 图像获取模块
在采集卡参数设置后对输入的视频进行单帧图像数据获取,CG300图像采集卡可以软件设置单帧图像对应的真实场景的范围以及获取图像的像素大小。
(3) 图像分割模块
为了快速、准确的从图像土壤背景中分离出棉苗,分割算法必须简单高效,同时需要考虑实际情况下光照与杂草的影响。国内外的研究成果表明,进行绿色植物与土壤背景的分离时,直接利用颜色信息是简单有效的方法。D.M.Woebbecke等人发现将彩色图像从RGB空间变换至rgb色度空间后利用2g-r-b进行图像分割可以有效地分离出绿色植物与土壤。M.S.El-Faki等人指出,在RGB空间中利用简单算术操作来组合R、G、B分量形成相对色彩因子也可以获得很好的分割效果。
通过对地膜覆盖下的棉苗在不同光照下拍摄的50幅图像进行分析后发现:在RGB空间中利用2G―R―B相对色彩因子比在色度空间中利用2r-g-b分割更为准确有效,由于无须转换至色度空间,算法简单快速,满足系统实时性的要求。
对彩色图像实现图像分割后,二值图像中会出现一些离散无规律的噪声,经分析其产生的原因是由于土壤中的沙石、泥块及杂草的影响,可以通过图像腐蚀的办法降低干扰。
(4) 特征提取模块
系统对分割后的图像提取出重心 和矩L两个特征参数,通过对矩参数L乘以系数k进行修正可以得到覆盖图像中目标的最小外接圆半径R。
(5) 图像识别模块
图像识别模块根据图像分割和提取的目标特征进行图像识别。由于系统只需检测出图像中是否有棉苗,所以可以直接从分割出的二值图像进行判断,具体方法是计算图像某一区域A中黑色目标点占区域总点数的百分比P,若P大于P0则有棉苗存在,P0的值可以通过试验统计得到。
(6) 摄像机标定模块
要实现棉苗上方地膜的精确定位切割,必须将图像中棉苗的特征信息还原成真实世界信息。空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系由摄像机成像的几何模型决定,构成这一几何模型的参数就是摄像机参数,确定这些参数的过程就是摄像机标定。系统将摄像机离棉田的高度固定,并认为其镜头中心线与棉田垂直。由于机车在行驶过程中,所以将棉苗的位置信息以相对坐标系表示,即将世界坐标系(表示棉苗真实位置的坐标系)与摄像机坐标系重合,世界坐标系原点为镜头中心在地面上的投影点。
(7) 真实场景恢复模块
当图像识别模块判断出图像中包含棉苗目标后,该模块恢复棉苗在世界坐标系中的特征信息。
4.2 棉苗检测识别定位子系统的实验
实验时采用4个摄像机同时处理4行棉苗,调整摄像镜头离棉田高度H使每帧图像对应的棉田面积为a*b平方厘米,机车以1m/s的速度牵引装备作业,摄像机设置为PAL制式,每帧图像的大小设置为w*h像素,DSP单元每秒并行处理各路摄像机输入的25帧图像。试验田中棉苗的株距为8~12cm,行距为25~30cm。
分析可知摄像机每拍一帧图像时装备前进4cm,当棉苗株距大于4cm时摄像机不会遗漏棉苗图像帧。分别调整高度H以及摄像机的输入、输出窗口大小,实验数据如表1所示。
从表1中可以看出,在高度H设为30cm时,通过调整摄像机输入窗口既不会遗漏棉苗图像帧,每帧图像也不会出现两株棉苗。同时通过调整摄像机输出窗口使h减少为300像素后每帧图像处理的平均时间约为26ms,准确率为98.2%,达到系统单帧处理时限及误判率要求。
表1 摄像机距地面高度为30时有关实验数据

5 切破刀具控制子系统
5.1 切破刀具控制相关问题
(1) 切割时间的控制
装备的摄像机镜头中心距切割刀具之间距离为s cm,检测系统识别定位棉苗平均需要t*秒,假定牵引装备的机车行进的平均速度为v m/s,则t时刻摄取某株棉苗后,滞后s/v-t*秒对该株棉苗上方的地膜进行切割。由于机车瞬时速度的变化会给切割时间造成影响,装备在s/v-t*-△t时刻通过传感器检测机车行进的瞬时加速度a,依据加速度确定实际切割时间。其中△t的选择不能过大或过小。
(2) 刀具编号的确定
棉苗严格的讲不会在一条直线上,以及装备行进中的左右摇摆都决定一把刀具完成对地膜切割的困难。对每行棉苗设置一组共5把刀具,依次编号为1、2、3、4、5,刀具之间间距设置为2cm。控制单元根据棉苗的位置与摇摆量确定刀具编号。
(3) 控制单元的结构
据上述控制策略分析可知,控制单元的输入量为棉苗的坐标、装备瞬时加速度a、装备行进中的左右摇摆量l,输出为切割的时间与切割的刀具编号。切割刀具编号的选择由棉苗坐标与左右摇摆量确定,切割时间由一确定时间和装备瞬时加速度a的影响来确定。控制单元总体结构如图3所示。
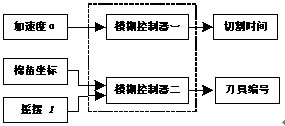
图3 控制单元总体结构
5.2 控制单元仿真结果
对控制单元的研究过程中,利用Matlab的模糊控制工具箱设计、实现模糊控制器,并利用Simulink构建结构图对控制单元进行仿真。计算机仿真结果表明模糊控制器设计合理,满足控制单元的要求。较好地解决机车非匀速与装备行进中的左右摇摆给控制系统带来的影响,从而使得装备能够准确地控制切割时间与切割刀具的正确选择。
6 结语
本文利用机器视觉检测、识别和定位棉田地膜下面的幼小棉苗,所识别和确定的棉苗及棉苗位置信息传输到地膜切破装备的控制单元,在控制单元的控制下完成对棉苗上方地膜的自动切割。并对地膜下方棉苗准确的检测、识别和定位方法和基于模糊推理的控制单元进行讨论,实验表明棉苗的检测、识别准确率在98%以上,对每株棉苗的检测、识别和定位需要约30ms。计算机仿真结果表明装备能够准确地控制切割时间与正确地选择切割刀具。
我国在使用机器视觉技术解决精细农业生产方面与国外相比有较大差距。笔者在这方面的研究旨在将高新技术用于我国的农业生产,为这个农业生产大国服务。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号