



.jpg)



当前位置:首页»案例
- 伺服系统控制器增益调节方法的研究
-
企业: 控制网 日期: 2004-12-27 领域: 点击数: 1635 白海军 汪莹
在以往高性能工业应用领域只能使用直流电动机,而现在则可以通过矢量控制技术或应用永磁同步电动机。由于大多数工业应用领域的永磁同步电动机驱动系统都是通过比例积分(PI)和比例积分微分(PID)控制器来控制的。所以,为了达到较好的系统性能,在不同的场合下,都希望获得最佳的PI和PID参数。在近些年来,为了提高传统PI和PID控制器的性能,在增益调节方面作了很多研究。但此项研究多数是应用于慢速的过程控制,而对于快速的运动控制研究很少。因此,本文提出和实验了两种新型的增益调节方法,一种是通过计算机软件进行调节,此方法精度高,结构简单,但成本较高;另外一种是运用数字逻辑电路进行调节,此方法结构复杂,精确度较低,但调节速度较快。这两种校准方法都是基于周期信息的,源于对PMSM驱动系统的速度暂态响应的精确分析。这两种控制器增益自校准方法不取决于系统参数(如负载转矩、参考速度和采样时间)的不同,可适用于各种不同情况,也不需要过程控制的先验知识,可以很容易地放在实时的控制任务当中,在不影响系统其它性能的基础上,系统的动态性能得到改善。另外,还可以运行在由于控制器饱和而出现的非线性情况。
1 理论部分
在图1中,Kpi为电流调节器传递函数,Kt是转矩系数,Ku是感应电动势系数,Ki为电流反馈回路传递函数(实现电流与磁通正交控制的电流反馈控制调节器参数),Rs是定子电阻,La是电枢电感,Jm为电动机转动惯量,Kp为PI调节器增益。按照系统结构图推导出系统的传递函数如下:
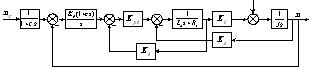
图1 交流伺服电动机的PI速度控制系统
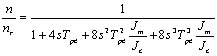
式中n和nr是速度和参考速度,Tpe为被控系统的等效电磁时间常数,Jc为控制器中设定的惯量(实为PI调节器的增益)。进一步推导得到系统超调量表达式如下:
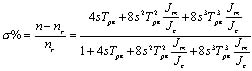
从上式很容易看出,如果Jc和Jm相等,可以得到最佳响应,通过调节Jc以使其接近所要求的超调,Jc是把PI控制器增益与系统响应联系起来的主要参数。如果把性能指标δ定义为实际超调量和理想超调量之间的差值,则很容易得到如下的增益调节思想。
? 当δ=0,超调在允许范围之内,Jc的值是合理的;
? 当δ>0,超调太大,Jc应增加;
? 当δ<0,和上面情况相反,Jc应减小。2 实验部分
图2为PMSM伺服系统的实验装置的原理图,整个系统包括一台主机,一个西门子SAB80C/86微控制器,一台位置与速度传感器,一台示波器,一个晶体管PWM逆变器及一个带有增量式位置编码器的三相PMSM。实验过程是电动机按照转子磁通定向原理来控制,众所周知,在PMSM中,电流幅值和转矩间的线性关系是通过把直轴参考电流idr设为0来保证的,它同时保证了转矩电流比的最大化。在这个假设的条件下,可以通过速度控制器来获得交轴电流iqr的参考值。dq-abc变换给出了需要滞环调节器的固有三相参考系中的电流参考值。速度控制器提供饱和电流。为了提高系统的动态特性,在饱和瞬态期间,同时提供了积分元件校正。主机通过它的串行端口和微控制器相连,负责驱动系统的实时命令和状态监视。另一方面,在系统控制和增益调节过程中,微控制器可以实现所有的实时数据处理。
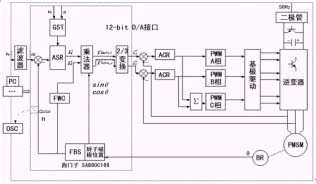
图2 伺服系统控制器增益调节实验装置原理图软件实现增益调节过程是指在一组有序数列中查找数据。它的粗略思想是:首先取出有序数列的中间值,然后用它和要查找的数据进行比较,如果要查找的数据与中间值相等,那么数据就算找到了,查找过程便告结束;如果要查找的数据大于这个中间值,则在序列的上半部分继续上述查找过程;如果要查找的数据小于这个中间值,则在数列下半部分继续上述查找过程。如果仍不能匹配,则需继续取1/4,1/8…部分的中间值进行比较,直到找到为止。
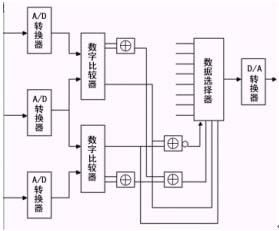
图3 数字逻辑电路实现增益调节原理图
图3是通过数字逻辑电路来实现系统超调的原理图,使用3个A/D转换器,2个数字比较器,1个计数器,1个数据选择器和1个D/A转换器。
硬件实现增益调节过程是在未采用微处理器时,具体调节过程简述如下:通过速度反馈得到系统的超调σ%,经A/D转换器将模拟信号转换成数字信号,与希望的超调范围[5%,7.5%]的转换值通过两个数字比较器进行比较,数字比较器的输出再经逻辑电路加以判断。并将σ%>7.5%或σ% <5%的一端接入数据选择器的启动端,数据选择器的数据端根据机械惯量的范围分8等分预置,当它为高电平时,选择器工作;当它为低电平时,选择器停止工作。其它数字比较器的输出端经计数器后作为数据选择器的选择信号,进行选择适当的惯量值。然后,经D/A转换器输出来改变控制器的增益,系统得到调节。
3 结论
本文提出并实验了新型而实用的PMSM伺服系统的PI控制器增益自动调节的方法。较为详尽的叙述了它的基本原理,调节算法和实验结果。调节方法是从分析PMSM伺服系统的速度阶跃响应中得出的,它确保了在所有情况下增益调节算法的收敛,而且它不取决于系统参数,如负载转矩、参考速度和采样时间。该方法已在PMSM伺服系统上得到了充分的测试,实验结果证明所提出的方法是简单的、多功能的、稳定和有效的。本文仅以超调这一动态性能指标作为研究对象来改善系统性能,而能否通过分析其它动态性能指标来改善系统性能有待进一步的探讨。另外,控制器增益的调节方法仍需要深入研究,尤其是非线性PID控制器的增益调节更有较为广阔的前景。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号