



.jpg)



当前位置:首页»案例
- 采用变频器实现线缆设备恒张力控制的方法
-
企业: 控制网 日期: 2005-06-02 领域: 点击数: 5652 摘要:以倒轴机为例,介绍了采用通用变频器来实现线缆收放卷恒张力控制的方法。
关键词:通用变频器;线缆收放设备;张力控制Abstract: By taking beaming machine as an example, this paper describes the methods that realize the constant tension control of pay-off and take-up reel of wire and cable by using general inverter.
Key words: General inverter; Pay-off and take-up device of wire and cable; Tension control1 引言
在电工机械制造行业,线缆收放卷设备使用得非常多。为了保障更好的产品质量和效果,线缆的收放卷设备一般都要求能保持线缆张力的稳定。目前市面上有各式各样的恒张力控制方案,其中最常见的有下列几种,它们各有优缺点。
(1) 力矩电机加驱动控制器
? 优点:设备简单,价格便宜,可正反转;
? 缺点:张力控制不稳定,线性不好。
(2) 磁粉制动器/磁粉离合器张力控制
? 优点:张力及速度可调,张力稳定性比力矩电机稍强,适用范围比力矩电机广;
? 缺点:需要调速单元(如变频器、直流调速器)及张力控制仪,增加成本。而且磁粉制动器/磁粉离合器的可靠性差,发热严重,功率大的还需水冷等,因此故障率高,维护成本大(经常要更换磁粉)。
(3) 直接张力闭环控制
? 优点:张力控制平稳,张力可调;
? 缺点:电气设备复杂,需要调速单元、张力控制仪及张力传感器,且电气调速单元要求响应快,因此设备初期投资大,价格昂贵。另外,系统容易振荡。
(4) 间接张力控制
这种方式现在有很多种实现方法,主要的有直接采用专用的直流调速器控制直流电机来实现的,近年也出现了应用内置张力专用软件的矢量变频器来实现的。
? 优点:张力和速度均线性可调,精度较高,方向可正反转。
? 缺点:设备成本比磁粉制动器/磁粉离合器张力控制和直接张力闭环控制稍低,但还是较高。另外,调试较复杂,有的甚至需要专业的调试工具及调试软件。
从以上几种张力控制方案的比较来看,后三种方案设备投入成本都比较高,且存在维护或调试复杂等问题。而力矩电机的控制方案虽然成本较低,但控制性能差,难以满足客户对产品质量日益严格的要求。行业的激烈竞争使得电工机械生产企业选用恒张力控制系统时所考虑的首要条件是既能保证产品性能,又经济实用。以上几种方案显然都不能完全满足这些要求。
有没有一种既能很好满足电线电缆生产工艺的要求,有效保障产品的质量,又能把设备投入的成本控制在合理水平的控制方案呢?答案是肯定的。本文就将提出两种只需采用通用变频器就能够实现的低成本高性价比恒张力控制方案。
下面以采用艾默生网络能源有限公司的通用型变频器EV1000在东莞某电工机械厂的倒轴机上成功实现的同步收放卷恒张力控制系统为例,详细介绍这两种方案的实施过程。2 倒轴机的结构与工作原理
该倒轴机的作用是将一种直径的卷倒换成另一种直径的卷。它的主要构成包括卷绕装置和放线装置,其结构示意图如图1所示。
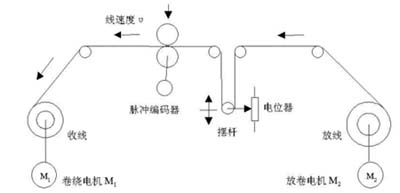
图1 倒轴机结构示意图从图1中可以看到,卷绕装置主要包括卷绕电机M1、收线卷筒和一对用来测速的辊。这对测速用的辊中,上辊可以上下移动,用来将线缆压在固定的下辊上,以便在线缆运动时能产生磨擦力将拖动下辊旋转。而下辊则通过与其同轴安装的脉冲编码器来检测线缆的线速度。因为此时编码器产生的脉冲信号其数量是与线缆的线速度成正比的。
放线装置通常是放线架,主要包括放卷电机M2、放线卷筒和摆杆。摆杆的作用相当于位置传感器,当系统的张力变化会引起摆杆位置偏移,这时摆杆就会带动尾部的电位器输出一个模拟信号指示偏移量。为了适应不同材料,通常摆杆上有一个可移动的重锤来调整系统张力。也有用低摩擦气缸方式实现的。不管哪种方式,都需要在调试时事先整定好。要说明的是,虽然是张力变化导致的摆杆位置变化,但摆杆反映的是位置量而非张力,因为在静态的时候摆杆可以在任何位置平衡。
在工作过程中,放卷电机M2需要随时紧跟卷绕电机M1动作,以保证放线速度和卷绕速度一致,保持线缆张力的稳定。张力稳定时,摆杆将保持在平衡位置。当卷绕速度比放线速度快时,摆杆就会偏离平衡位置向上运动,这时就需要放卷电机M2加速运行;反之,当卷绕速度比放线速度慢时,摆杆就会偏离平衡位置向下运动,这时就需要放卷电机M2减速运行;如果减速到零速时摆杆依然在往下运动,则就要求放卷电机M2自动反转。3 倒轴机恒张力控制系统方案的选择
从倒轴机的结构及其工作原理可以看出:
? 卷绕电机M1是主牵引,它的转速n1决定了生产过程中线缆的线速度υ。υ与n1的关系为:
υ=π*D1* n1 (1)
式(1)中,D1为收线卷筒的直径。
? 对于放卷电机M2,它的转速处于被动跟随状态,只有很好地和电机M1同步,才能保证系统张力F的稳定。另一方面,系统张力F的大小取决于放卷电机M2的输出转矩T2。T2与F的关系为:
T2=F*D2/2 (2)
上式中,D2为放线卷筒的直径。通过控制M2的输出转矩T2可以改变系统的张力F,这会使摆杆的平衡位置改变。因此摆杆的位置能够反映系统张力F的大小。
从式(1)和式(2)可以看到,对于倒轴机系统,要保持工作过程中线缆的张力不变,则必须保证驱动电机的转速与卷筒直径成反比,且转矩的变化与卷筒直径成正比。而在倒轴机工作过程中,卷筒直径都是在一直变化着的。因此如果要通过直接控制电机的转速或转矩来实现线缆张力的恒定,就必须在线检测或计算收线卷筒的直径,这样就需要增加检测设备,或进行复杂的计算。而且进行转矩控制则需要使用矢量型变频器或改用直流电机,则系统的设备成本必然大幅增加,显然并不可取。
考虑到倒轴机的卷绕装置本身利用脉冲编码器检测出了系统线速度υ的信号,如果利用这个信号作为过程量反馈进行闭环控制,就可实现线缆线速度υ的恒定,从而间接达到恒定线缆张力的目的。可见利用这种方法实现恒张力控制,只需要采用能够接收脉冲反馈信号,可以对线速度参量进行闭环控制的通用变频器即可完成。
而对于放线装置,由于其摆杆的位置偏移量能够反映出系统张力的变化,因此可以直接对摆杆的位置量进行闭环控制,使摆杆始终稳定在平衡位置,这样也可以间接达到保持张力恒定的目的。这种恒张力控制方法也只需要采用具有过程量闭环功能,带内置PI控制器的通用变频器就可以实现了。
因此,倒轴机的卷绕装置采用了恒线速度闭环控制,而放线装置采用的则是对摆杆位置量的闭环控制。这两种方案均是通过间接的方式实现了线缆的恒张力控制,而且都可以只用通用变频器就能方便地完成。
至于变频器的选择,一方面需要满足该系统的需求,另一方面作为机械设备生产厂家,还希望变频器本身具有高的可靠性和良好的环境适应能力。本案例中客户选用了艾默生网络能源有限公司生产的通用型变频器EV1000,主要是因为EV1000具有以下优点:
? 将客户通用需求与客户个性化需求、行业性需求有机融合,具有十分丰富的实用功能;
? 采用独特的控制方式,具有高转矩、高精度、宽调速驱动等良好控制特性,实现了通用变频器的高性能化;
? 具有超出同类产品的防跳闸性能和适应恶劣电网、温度、湿度和粉尘能力,极大地提高了产品的可靠性。4 系统方案的实施
4.1 卷绕装置的恒线速度控制
根据前面的分析可知,本系统卷绕装置线缆的张力恒定是通过对线速度υ的控制来实现的。所以该卷绕装置变频控制系统以线速度υ作为直接的控制对象,通过闭环PI控制使其保持恒定,从而达到线缆张力稳定的最终目的。该控制系统的原理图如图2所示。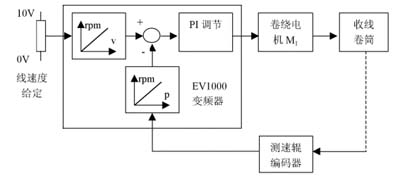
图2 卷绕装置恒线速度控制系统原理图从图2可以看到,由于EV1000没有专门的线速度控制功能,电位器送入的线速度给定信号(0~10V)在变频器内部被换算成转速信号,脉冲编码器反馈的脉冲信号也同样需要被换算为相对应的转速信号。然后两个量进行比较,再经过内置的PI调节,最后输出相应的控制量改变卷绕电机M1的转速n1,使线缆的线速度υ迅速稳定在给定值。
在使用时,电位器直接使用EV1000变频器的10V DC电源,作为线缆线速度υ的给定信号。用户可以根据需要通过电位器灵活调整所需要的线速度υ的值。0~10V对应0~最大线速度。该装置只需要单相编码器即可。如果安装的是双相编码器,实际使用中只需要接入其中一相的信号。另外,因为EV1000本身提供了24V DC的电源,所以编码器尽量选择可使用该电源的型号,以进一步降低系统的设备成本。
该装置中控制卷绕电机M1的EV1000变频器控制回路接线示意图如图3所示。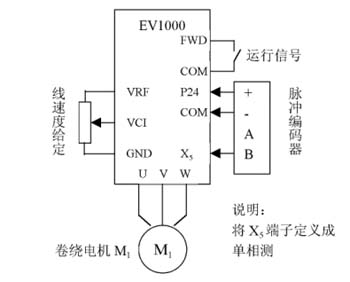
图3 卷绕电机M1变频器控制回路的接线示意图4.2 放卷装置的恒张力控制
因为放卷装置中摆杆的位置偏移量能够反映出系统张力的变化,所以对放卷装置的张力控制就以摆杆的位置量作为直接的控制对象。放卷装置控制系统的原理图如图4所示。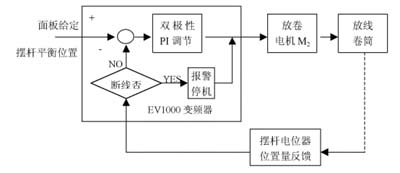
图4 放卷装置张力控制系统原理图放卷装置的张力控制是通过对摆杆位置量的控制来间接实现的,为了使系统张力恒定,只要让摆杆一直保持在某一固定的平衡位置即可。通常以摆杆动作范围的中间位置作为调节目标。对于本系统,摆杆是以一端为支点,另一端在水平位置的-90~+90°之间摆动,其中间位置为水平位置。因此以摆杆的水平位置作为控制系统的调节目标,即系统的平衡位置。
在使用时,为了满足不同型号线缆不同生产工艺的要求,在摆杆上有一个可移动的重锤,通过调节该重锤的位置可以对系统张力进行调整。同时为了更好地保证产品的质量和可靠性,针对这类应用场合,该EV1000变频器开发了两种非标功能:
(1) PI控制器的输出信号为双极性。即变频器在闭环控制时输出频率可以在正值和负值之间变化,电机能够自动反转。如本装置,当张力减小,摆杆低于平衡位置时,放卷电机的速度将降低,如果转速降到了零,摆杆未能升高到平衡位置,此时变频器会输出负极性频率信号,使放卷电机自动反转直到摆杆升到平衡位置为止。这样就能使放卷装置收放自如,更好地满足生产工艺和用户的需要。
(2) 有断线的自动检测和保护功能。即在系统工作过程中由于张力过大或其他原因导致线缆断开,或系统异常失去张力时,变频器能够自动检测和判断,给出故障信号,并且自动停机。
本放卷装置中摆杆位置是通过摆杆支点处安装的电位器输出信号来指示的。该电位器的输出值与摆杆位置量的对应关系可以调整。本系统从EV1000变频器取得10V DC电源加在电位器两端,因此摆杆位置量的反馈信号为0~10V的模拟量。为了方便起见,将摆杆在水平位置时电位器的输出值调整到中间值5V,放卷装置控制系统的给定值则通过变频器面板直接设定为5V。
该系统中变频器控制回路的接线示意图如图5所示。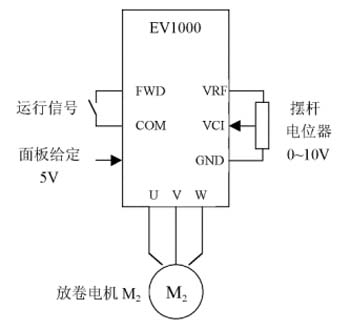
图5 卷绕电机M1变频器控制回路的接线示意图5 系统的特点
(1) 线速度可以用电位器平滑调节,张力也可以通过改变摆杆重锤的位置进行调整;
(2) 由于摆杆具有张力贮能功能,即使张力出现一定幅度的异常波动,也不影响系统的正常工作;
(3) 因为EV1000变频器具有双极性的PI调节器,在张力突然减小,放线装置可以迅速减速甚至于自动反转回拉,保证了系统的平稳运行;
(4) 使用这种方案,只需要通用的变频器就可以方便地完成线缆的恒张力同步收放卷等功能;
(5) 当出现断线或因意外造成系统失去张力时,变频器能够马上自动检测出来,并采取报警、停机等应急措施;
(6) 系统结构简单,调试便捷,且设备投入成本低。6 结语
该系统投入生产后,使用方便、性能稳定,以良好的性能价格比获得了客户的好评。事实证明,这种方案简单易行,稳定可靠,适应性强,可以在电工机械、线缆生产设备及相关行业上推广应用。
参考文献:
[1] 三菱电机株式会社编. 变频调速器使用手册[M]. 兵器工业出版社, 1998.
[2] 艾默生网络能源有限公司. EV1000系列通用变频器用户手册[M].
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号