



.jpg)



当前位置:首页»案例
- 基于PID神经元网络的交流感应电动机解耦控制研究
-
企业: 控制网 日期: 2007-08-14 领域: 工业以太网 点击数: 556
引言
高性能的三相感应电动机在工业生产、国防和民用等领域有着广泛的应用。然而,由于感应电机是一个高阶、非线性、强耦合的多变量系统,要对它进行高性能的控制是相当困难的。很多学者多年来对感应电动机的控制作出了巨大的贡献,也取得了突出的成就。目前对感应电机的控制主要是采用德国学者1971年提出的感应电机磁场定向的矢量控制,这是基于感应电动机的精确数学模型。由于基于精确数学模型的矢量控制方法对电动机参数的稳定性要求很高,在电动机参数发生变化时控制系统的抗负载扰动能力并不是很好,系统的鲁棒性能比较差,所以这种方法很难得到理想的控制性能。由于神经网络具有万能逼近和自学习的能力,并且随着神经网络理论的快速发展,为解决感应电机的高性能控制提供了一种良好的方法。我国学者舒怀林教授于1997年提出了一种PID神经元网络,这种神经网络具有收敛速度快,训练和学习时间短,且不易陷入局部极小点等优点。如果把PID神经元网络引入到感应电动机的控制中来,可以取得比较理想的效果。
一、 感应电动机的矢量控制原理
从本质上说基于PID神经元网络的感应电动机控制还是属于磁场定向的矢量控制。由感应电动机的动态多变量数学模型经过坐标变换,按照不同坐标系下磁动势相同的原则,把感应电机的物理模型等效地变换成坐标旋转的直流电动机模式。如图1所示,M、T坐标系是相对于定子以角速度ω1(同步速)旋转的坐标系。若转子的角速度为ω,则M、T坐标系相对于转子的角速度为ωs=ω1-ω,即转差角速度。取M轴方向与转子磁链矢量ψ2方向一致,即所谓的转子磁场定向。由交流电动机的数学模型,经坐标变换后可得在M、T坐标系中笼型异步电动机的数学模型。
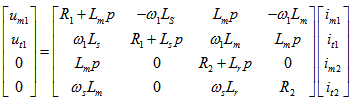
其中式中im1、it1——定子电流在M、T轴分量
Lm——定、转子间的互感
Lr——转子绕组每相的自感
R2——转子绕组每相的电阻
p——求导算子
此时经过推导可得到电机的转矩方程和转子磁通方程如下:
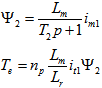
式中Te——电机的电磁转矩
np——电机极对数
由于ψ2本身就是以同步转速旋转的矢量,则有: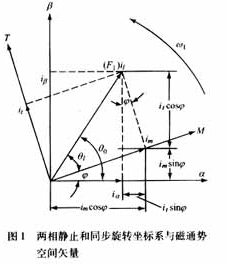
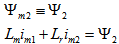 ,也就是说通过转子磁场定向的旋转坐标变换,三相交流感应电动机可以等效成同步旋转坐标系下的励磁电流为im1,电枢电流为it1的直流电机,并且等效直流电机的磁通为原交流感应电机的转子总磁通ψ2。那么对感应电动机的控制就可以模仿直流电动机的控制方法了。直流电动机在调速过程中磁通总是恒定的,所以电机的转速与电压之间存在线性的关系,很显然,如果交流感应电动机要达到直流电动机的控制效果,那么也应该保证磁通不变。既然感应电机能等效成旋转的直流电机,那么可以模仿直流电动机控制,以感应电动机的转子总磁通ψ2和转子转速ω为输出变量。为了得到良好的转速控制效果,必须保证在调速过程中ψ2保持不变。因此可以对转子总磁通ψ2进行闭环控制,设计一个良好的控制器使转子转速与转子总磁通实现解耦控制。其矢量控制系统结构如图2所示。这是基于参数的解析控制方案。
,也就是说通过转子磁场定向的旋转坐标变换,三相交流感应电动机可以等效成同步旋转坐标系下的励磁电流为im1,电枢电流为it1的直流电机,并且等效直流电机的磁通为原交流感应电机的转子总磁通ψ2。那么对感应电动机的控制就可以模仿直流电动机的控制方法了。直流电动机在调速过程中磁通总是恒定的,所以电机的转速与电压之间存在线性的关系,很显然,如果交流感应电动机要达到直流电动机的控制效果,那么也应该保证磁通不变。既然感应电机能等效成旋转的直流电机,那么可以模仿直流电动机控制,以感应电动机的转子总磁通ψ2和转子转速ω为输出变量。为了得到良好的转速控制效果,必须保证在调速过程中ψ2保持不变。因此可以对转子总磁通ψ2进行闭环控制,设计一个良好的控制器使转子转速与转子总磁通实现解耦控制。其矢量控制系统结构如图2所示。这是基于参数的解析控制方案。
二、 PID神经元网络的控制原理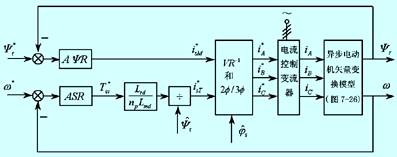
图2 具有转速、磁链闭环控制的直接矢量控制系统结构
事实上,通过解析方法实现转速和转子总磁通的解耦控制是比较困难的,而且解析法所得到的解耦控制效果也不是很理想。PID神经元网络能够实现多变量系统的广义解耦,每个被控量都按其给定值变化,不受其他被控量的给定值影响,具有良好的动态和稳态响应特性
1、 单变量PID神经元网络结构(SPIDNN)
SPIDNN是一个三层前向神经元网络,为2×3×1结构,它的输入层有两个神经元,接收外部输入信息,隐层有三个神经元,分别为比例元、积分元和微分元,完成比例、积分和微分运算,输出层只有一个神经元,完成控制规律的综合和输出,其结构如图3所示。
1)、比例元(P)在K时刻的状态式为
图3 SPIDNN结构图 ,其比例系数为1。
,其比例系数为1。
2)、积分元(I)在K时刻的状态为
3)、微分元(D)在K时刻的状态为
其中 为神经元的总输入量
为神经元的总输入量 为神经元的非线性输出函数,Wij为连接权值。
为神经元的非线性输出函数,Wij为连接权值。
2、 多变量PID神经元网络结构(MPIDNN)
MPIDNN是SPIDNN的扩充和发展形式,它仍然是三层前向网络,由多个SPIDNN子网交叉并联而成的。如果被控对象为M个输入,N个输出,该MPIDNN就有2N个输入单元,隐含层有3N个处理单元,构成2N×3N×M结构的网络。它的输入层到隐含层是按子网独立的,而其隐含层至输出层的连接权则是相互交叉连接的,使整个多输出PIDNN结合为一体。其结构如图4所示。
3、 PID神经元网络的控制算法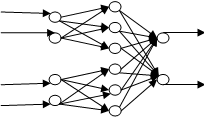
图4 MPIDNN结构图
在PID神经元网络控制系统中,以MPIDNN来取代解析控制系统中的转子总磁通调节器和转子转速调节器以及其他非线性部分。MPIDNN作为整个感应电机控制系统中的控制器,并要求实现转子总磁通和转子转速的解耦控制,则MPIDNN必须要满足四输入两输出,构成4×6×2的网络,其中外部输入有两个,一个是转子总磁通的给定值,另一个是转子转速的给定值,而两个输出中一个是等效直流电机的励磁电流控制量 ,另一个是电枢电流的控制量 。控制系统的结构图如图5所示。
根据高性能控制要求,在一定给定值下应保持转子总磁通和转子转速不变,也就是说要使给定量与实际输出量之间的误差最小。由于MPIDNN采用误差后向传播的批学习算法,学习的目标就是使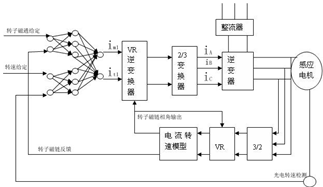
图5 PID神经元网络控制系统结构图 为最小。式中l为每批采样点数,n为被控变量个数。在本系统中采样点数l=100,被控变量个数n=2。网络通过训练和学习,调整MPIDNN的连接权重值,使系统达到解耦的目的。
为最小。式中l为每批采样点数,n为被控变量个数。在本系统中采样点数l=100,被控变量个数n=2。网络通过训练和学习,调整MPIDNN的连接权重值,使系统达到解耦的目的。
假设n0为学习的步数,那么根据MPIDNN理论,隐含层至输出层的权重值迭代公式为 ,由于多变量对象的输出和输入之间存在耦合作用,经推导,上式中
,由于多变量对象的输出和输入之间存在耦合作用,经推导,上式中 ,其中h为输出层神经元序号,s为子网的序号,j为子网的隐含层神经元序号,
,其中h为输出层神经元序号,s为子网的序号,j为子网的隐含层神经元序号, 为隐含层各神经元输出值,
为隐含层各神经元输出值, 为隐含层至输出层的连接权重值,
为隐含层至输出层的连接权重值, 为系统输入变量K时刻的采样值,
为系统输入变量K时刻的采样值, 为系统输出变量K时刻的采样值。而输入层至隐含层之间的权重值可以用
为系统输出变量K时刻的采样值。而输入层至隐含层之间的权重值可以用 推导公式进行迭代计算。上式中i为输入层神经元序号,
推导公式进行迭代计算。上式中i为输入层神经元序号, 为隐含层神经元的总输入,
为隐含层神经元的总输入, 为隐含层的输出状态。为训练系统的解耦性能,可以用以下三种类型的阶跃给定输入作为训练输入变量
为隐含层的输出状态。为训练系统的解耦性能,可以用以下三种类型的阶跃给定输入作为训练输入变量 ,其中r1为转速给定输入,r2为转子总磁通给定输入,把这三个阶跃输入分别代入网络,并设定输入层至隐含层比例元和微分元连接权初始值为,输入层至隐含层连接权初始值为
,其中r1为转速给定输入,r2为转子总磁通给定输入,把这三个阶跃输入分别代入网络,并设定输入层至隐含层比例元和微分元连接权初始值为,输入层至隐含层连接权初始值为 ,隐含层至输出层连接权初始值为
,隐含层至输出层连接权初始值为 ,学习步长为 。这样经过100步的训练后整个神经网络控制器可以使系统达到比较好的控制效果。
,学习步长为 。这样经过100步的训练后整个神经网络控制器可以使系统达到比较好的控制效果。
三、 系统仿真结果分析
利用MATLAB中自带的神经网络工具箱,按照系统的控制结构连接系统仿真结构,设置好网络各层的连接权初值,并设定学习不长,把实验所测量得到的数据导入网络中进行训练。
由于系统只是用神经网络控制器来取代传统的解耦器和控制器,实际上还是对感应电机的变换模型进行控制,因此在变换环节还需设置电机的参数。而转子磁链检测环节仍然采用传统的按磁场定向二相旋转坐标系转子磁链观测模型。这种观测模型依赖于电机参数T2和Lm,所以控制精度在一定程度上还要受到参数变化的影响。仿真是根据实际电机的设置仿真参数的。这里取一台额定功率为1.1KW的笼式感应电机为例,其参数为:额定转速1400rpm,极对数2,定子电感0.574H,转子电感0.58H,互感0.55H,转子惯量0.0021kgm,定子电阻5.9Ω,转子电阻5.6Ω,额定负载为7.5Nm。系统仿真的结果如图6所示。
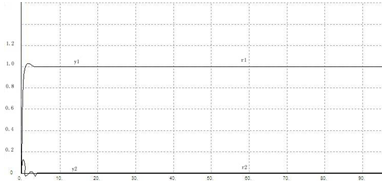
(a)
从仿真结果中可以看出以MPIDNN为控制器的感应电机矢量控制系统可以很好地实现对转子总磁通和转子转速的解耦,系统的超调量小,并且有很强的抗负载扰动能力。如果保持转子总磁通给定值不变,那么在电机调速过程中转子总磁通可以保持恒定,这就大大提高了系统的控制性能。
(b)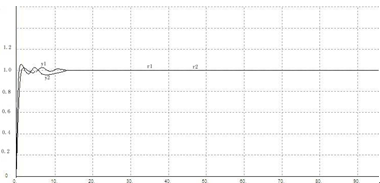
(c)
图6 系统解耦控制的仿真输出
四、 结束语
通过对基于PID神经元网络的感应电机矢量控制系统的仿真分析中可以看出,这种控制方法可以在一定程度上解决传统控制方法中所存在的缺点,可以得到比较理想的控制性能。为提高感应电机的控制性能提供了一种有效途径。系统中的转子磁链观测环节其实也可以用神经网络辨识的方法来取代依赖于参数的传统观测模型,使转子磁链的检测精度不受参数变化的影响,因此系统还有待于进一步的改进。
参考文献:
1陈伯时.电力拖动自动控制系统(第2版)[M].机械工业出版社,2004.
2戴先中.多变量非线性系统的神经网络逆控制方法[M].科学出版社,2005.
3 舒怀林.PID神经元网络及其控制系统[M].国防工业出版社,2006.
4楼顺天.基于MATLAB的系统分析与设计——神经网络[M].西安电子科技大学出版社,1998.
5 尔桂花 窦曰轩.运动控制系统[M].清华大学出版社.2002.
作者简介:
苏远平,男,1977年8月生,汉族,江西理工大学机电工程学院硕士研究生,江西理工大学南昌校区教师,助教,主要从事运动控制系统和智能控制的研究工作。
陈善富,男,汉族,江西理工大学硕士研究生导师,教授,主要从事运动控制系统和检测仪表的研究。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号