



.jpg)



当前位置:首页»案例
- 基于LabVIEW的SIP系统辨识设计与实现
-
企业: 控制网 日期: 2008-08-28 领域: 仪器仪表 点击数: 1454 
李超(1974-)
男,河南南阳人,毕业于上海电力学院电力系统及其自动化专业,
现就职于大亚湾核电运营管理有限责任公司。1 SIP系统背景介绍
SIP系统又叫做过程仪表系统,作为核岛KRG系统的一部分,其作用是将由变送器测量得到的过程变量(压力、水位、流量、温度、转速等)信号进行必要的处理,最终经阈值处理形成逻辑保护信号,送至RPR进行逻辑运算(3取2或4取2)形成保护指令。SIP系统和RPN(核仪表系统)、RPR(反应堆保护系统)以及所有专设安全系统(如RIS、EAS、ETY等)一起,构成广义的反应堆保护系统。在正常运行工况下,SIP系统的故障是隐蔽的。但是,SIP作为反应堆广义保护系统一个重要组成部分,其故障将直接威胁到核电站的安全和正常运行。为了及时发现故障以保证SIP系统的可用性,必须对SIP系统进行定期试验。而开发新型的定期试验装置的一个重要功能就是对SIP系统中的具有时间参数的模块进行系统辨识。由于一些静态模块例如加法器ZO模块和函数发生器GD模块等在大修期间是容易调教的,它们的输出只与其输入有关,而且不随着时间的改变而改变,而惯性环节FI、超前滞后环节MT和微分环节DR动态时间参数模块的输出即跟其输入有关也跟时间有关。故对这些模块进行系统辨识具有很强的实践性而且是很有意义的,既方便了系统模块调教,更加有利于保障SIP系统运行的可靠性。
2 辨识系统和LabVIEW简介
辨识理论是研究利用系统的输入输出数据,通过一定的准则建立系统等价模型的理论。由于实际系统的复杂行为,辨识理论在系统建模和控制工程中都得到了广泛的应用。随着计算机硬件和软件技术的发展,使得目前采用一些高级软件和集成硬件模块,可以很容易组成“虚拟仪器”。这相对于采用传统仪器仪表构成的系统,可大大缩短开发时间和成本。
早在八十年代,随着NI LabVIEW的诞生,形成了一种“虚拟仪器”概念。在计算机上安装数据采集卡,然后利用软件在屏幕上生成仪器面板,并且用软件对信号进行处理和分析,这就构成了一台虚拟仪器。虚拟仪器的主要特点是:具有用户定制的个性化面板,适合于信号处理应用,开发周期短、成本低、维护方便,易于应用新理论、新算法和新技术。LabVIEW是一种常用的虚拟仪器开发应用软件,利用它组建仪器和数据采集系统可以简化程序的设计。并且提供了功能强大的高级数学分析库,包括统计、估计、回归分析、时域和频域算法等可满足各种计算和分析需要。为小波、系统辨识和数组滤波器等高级或特殊分析场合提供了附加软件包。
本文讨论的辨识平台基于LabVIEW环境下,以实际的SIP系统中具有时间动态参数的通道为对象,信号发生、采集功能和辨识模型构成一套系统辨识试验平台。
3 系统辨识结构图
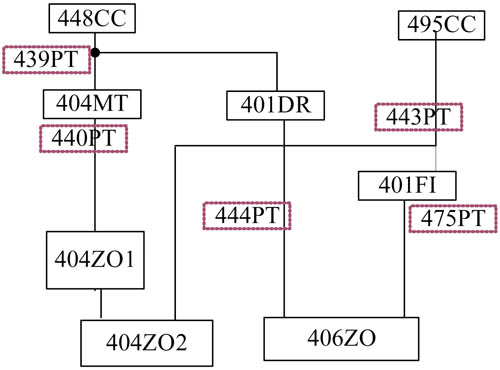
图1 SIP系统RCP10回路简图SIP系统的每个回路都包括CC开关(模拟量信号的输入点)、PT点(模拟量信号的监测点)和XU(数字量信号的输出点)。图1为SIP系统RCP10回路的一个带有动态模块参数FI、MT和DR的回路简图,其中PT点即为SIP系统的模拟量信号监测点。

图2 系统辨识结构图系统辩识结构如图2所示,系统主要采用了一台工控机和两块NI公司的数据采集卡来实现,即PCI6289和PCI6733。PCI6733有8路AO,M系列板卡PCI6289有32路AI和48路DI。 PCI6733板卡输出的模拟量信号通过信号调理模块注入到SIP系统的448CC和495CC开关点处,其中MT模块的输入和输出的PT点为439PT和440PT,FI模块的输入和输出的PT点为443PT和475PT,DR模块的输入和输出的PT点为439PT和444PT。以上PT点信号通过信号调理模块送到PCI6289板卡来采集。系统通过对输出信号及采集信号进行处理得到动态时间参数模块的传递函数。
4 基于LabVIEW的系统辨识设计与实现
经典的系统辨识方法的发展已经比较成熟和完善,包括阶跃响应法、脉冲响应法、频率响应法、相关分析法、谱分析法、最小二乘法和极大似然法等。针对大亚湾SIP系统中,具有动态参数模块的只有FI模块,其传递函数为
 ,超前滞后环节MT模块,其传递函数为
,超前滞后环节MT模块,其传递函数为 ,微分环节DR模块,其传递函数为
,微分环节DR模块,其传递函数为 。本文采用阶跃响应法来实现动态模块的辨识。
。本文采用阶跃响应法来实现动态模块的辨识。SIP系统中具有动态环节模块的板件输入为1-5V,而输出也限制在了1-5V的范围内,故加阶跃信号时的初值信号应为1-5V范围之内,初值选择为1V的信号。由于板件的输出也加以限制故阶跃的幅值不易过大,即统一选择了0.3V的阶跃信号。由于刚注入1V信号时,系统本身有一个阶跃响应,但是由于输出的限制,此段数据不应作为系统辨识的有效数据之用,当系统过几十秒中系统稳定之后,再注入0.3V的阶跃信号,此段数据为有效数据。即前40秒输出为1V,后面30秒输出为1.3V的阶跃,数据采集时采集后30秒钟的信号作为系统辨识的输入。
4.1 惯性环节FI模块
惯性环节FI模块的传递函数为
 ,当有一个初值1V信号注入时
,当有一个初值1V信号注入时 ,即,y值会有一个阶跃响应,具体理论推导如下:
,即,y值会有一个阶跃响应,具体理论推导如下:
由此可见,当
 时,
时, 。在RCP10通道中
。在RCP10通道中 。
。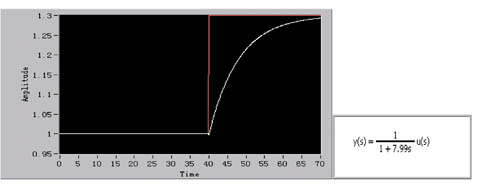
图3 FI模块的输入输出波形图和传递函数
由上述理论推导公式可知系统稳定之后,即40秒之后系统稳定在了初值1V,图3为FI模块的输入输出波形图以及系统传递函数图,即PCI6289采集的443PT和475PT点的信号的波形图,阶跃一条曲线(443PT)为系统辨识模块的输入信号,即系统辨识工具包中SI Estimate Transfer Function Model.vi的stimulus signal项,平滑曲线(475PT)为经过动态模块FI之后的信号,也作为系统辨识模块的输入信号,即系统辨识工具包中SI Estimate Transfer Function Model.vi的response signal项,由于FI模块的传递函数分子和分母的阶数已经确定,即分母为1,分子为0,故最终可汇出的系统的传递函数。
4.2 超前滞后环节MT模块
超前滞后环节MT模块传递函数为
 ,当有一个初值1V信号注入时,即
,当有一个初值1V信号注入时,即 ,y值会有一个阶跃响应,具体理论推导如下:
,y值会有一个阶跃响应,具体理论推导如下:
由此可见,当时
 ,
, 。在RCP10通道中,
。在RCP10通道中,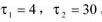 。
。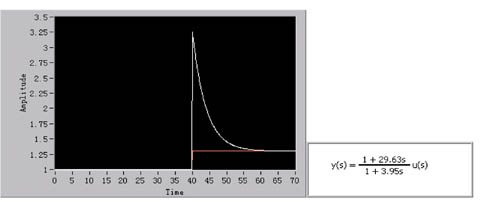
图4 MT模块的输入输出波形图和传递函数由上述理论推导公式可知系统稳定之后,即40秒之后系统稳定在了初值1V,图4为MT模块的输入输出波形图以及系统传递函数图,即PCI6289采集的439PT和440PT点的信号的波形图,阶跃曲线(439PT)为系统辨识模块的输入信号,即系统辨识工具包中SI Estimate Transfer Function Model.vi的stimulus signal项,平滑曲线(440PT)为经过动态模块FI之后的信号,也作为系统辨识模块的输入信号,即系统辨识工具包中SI Estimate Transfer Function Model.vi的response signal项,由于MT模块的传递函数分子和分母的阶数已经确定,即分母和分子为1,故最终可汇出的系统的传递函数。
4.3 微分环节DR模块
微分环节模块传递函数为,当有一个初值1V信号注入时,即,y值会有一个阶跃响应,具体理论推导如下:


由此可见,当 时,
时, 在RCP10通道中
在RCP10通道中 。
。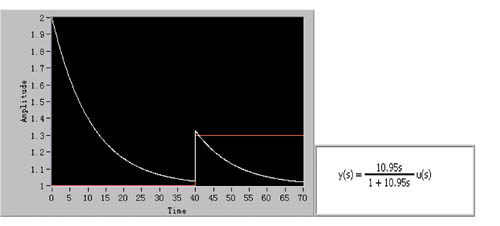
图5 DR 模块的输入输出波形图和传递函数
由上述理论推导公式可知系统稳定之后,即40秒之后系统稳定在了0V,由于DR模块板件本身的特性,输出值是在理论基础上叠加了1V的信号,图5为DR模块的输入输出波形图以及系统传递函数图中可知,即PCI6289采集的439PT和444PT点的信号的波形图,阶跃曲线(439PT)为系统辨识模块的输入信号,即系统辨识工具包中SI Estimate Transfer Function Model.vi的stimulus signal项,平滑曲线(444PT)为经过动态模块DR之后的信号,由于此信号是叠加了1V之后的信号,所以应该减去1V之后的信号作为系统辨识模块的输入信号,即系统辨识工具包中SI Estimate Transfer Function Model.vi的response signal项,由于DR模块的传递函数分子和分母的阶数已经确定,即分母和分子为1,最终可汇出的系统的传递函数。
5 结论
利用虚拟仪器技术设计的系统辨识平台,在功能和特性上都满足而且实现了SIP系统辨识的开发,使用NI公司的数据采集卡以及LabVIEW图形化开发环境设计的平台,使用和维护比较方便并且性能稳定可靠。
参考文献:
[1] National Instruments Corporation.LabVIEW User Manual.
[2] 杨乐平,李海涛 赵勇.LabVIEW高级程序设计.北京:清华大学出版社.2003.
[3] 刘君华,贾惠芹.虚拟仪器图形化编程语言LabVIEW教程.西安:西安电子科技大学出版社.2001.
[4] 候国屏,王坤,叶齐鑫. LabVIEW 7.1编程与虚拟仪器设计[M]. 清华大学出版社. 2005.7.
[5] 雷振山.LabVIEW7 Express实用技术教程[M] .北京.中国铁道出版社,2004.
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号