



.jpg)



当前位置:首页»案例
- 三电平逆变器矢量控制合成方法探讨
-
企业: 控制网 日期: 2008-10-26 领域: 变频器 点击数: 3704  李善田(1965-)
李善田(1965-)
男,安徽六安人,淮南联合大学机电系教师,教授电力电子、变频器技术、PLC控制技术等课程,安徽理工大学在职硕士,工程师职称。主要研究方向为电力电子,工业现场控制技术。
摘要:本文首先分别介绍了三电平逆变器拓扑的基本工作原理及其空间矢量脉宽调制和异步电机动态数学模型下的矢量控制方法。并在此基础上对异步电机矢量控制与三电平之间的接口进行了讨论,主要对矢量所落扇区及小三角形区域判断、参考电压矢量的合成进行了讨论,并给出了仿真结果。
关键词:三电平;空间矢量脉宽调制;矢量控制;矢量合成Abstract: Firstly, this paper introduces the operation principle and SVPWM of the three-level inverter’s topology, and the vector control method of the asynchronous motor based on dynamic mathematic model. Base ont study of the interface between the vector control and the three-level inverter, put emphasis on discussing its judging of the sector and triangular regions and the composition of reference voltage vector, the corresponding simulation results is presented.
Key words: three-level;space-vector pwm;vector control;the composition of the voltage vector1 引言
众所周知,矢量控制使异步电机具有直流电机几乎相同的优越调速性能,克服了普通变压变频控制的变频器存在的诸如过载能力差,起动转矩受限制,低频重载时起动困难等缺点。
多电平逆变器是实现高压变频调速的一种高效可靠的方法,而二极管中点钳位式三电平逆变器则是最具代表性电路。这种变换器结构由于二极管的钳位,使得每个功率开关管承受的最大电压为直流侧电压的1/2,从而可由中低压器件实现中、高容量的变换器;由于相电压有正、负、零3种电平状态,比传统的一电平逆变器多了一个电平,其谐波水平明显低于两电平逆变器;另外由于采用了不对称的双向开关,能量可以双向流动,很好地控制功率因数和实现电机四象限运行。
本文针对三电平逆变器控制的异步电机调速矢量控制及其矢量合成方法进行了探索。
2 三电平逆变器原理及其SVPWM
图1是一个典型二极管箝位式三电平逆变器电路拓扑。
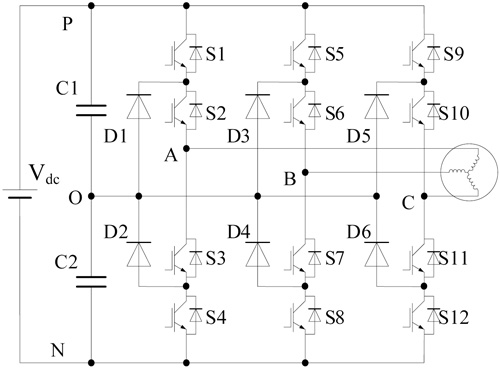
图1 二极管箝位式三电平逆变器电路
以A相为例,当S1和S2导通,S3和S4关断时,A相输出一个正电平;当S1和S4关断,S2和S3导通,A相输出一个零电平;当S1和S2关断,S3和S4导通,A相输出一个负电平。这样,通过对各相桥臂四个管子开通关断状态的控制,即可控制输出的电平。对于N电平的二极管箱位型逆变器拓扑,每个桥臂需要(N-1)个直流分压电容,2(N-1)个主开关器件,(N-1)(N-2)/2个箱位二极管。
主电路中每相桥臂上都有四个开关管。这四个开关管开关状态的有效组合可以分别输出三种电平:正电平P、零电平O和负电平N。以A相为例,其开关组合如表1所示。
表1 A相中的开关状态和输出电压

B相和C相类似,这样三相一共能够输出33共计27组合状态。显然,每一种开关状态对应了一个空间矢量。得到三相三电平逆变器的空间矢量图如图2所示。图中的空间矢量可简单分为四类:矢量箭头对应于外围正六边形两边交点的空间矢量定义为大矢量(如PPN,PNP等);矢量箭头对应于外围正六边形每边中点的空间矢量定义为中矢量(如PON,NOP等);矢量箭头对应于内部小正六边形两边交点的空间矢量定义为小矢量(如PPO,OON,OOP,NNO等);还有三个特殊的矢量PPP,OOO和NNN定义为零矢量。显然,由于每两个小矢量是一对冗余矢量,且三个零矢量也互为冗余矢量。实际独立的矢量一共为19个。这即三电平矢量控制逆变器形成的物理和数学分析基础。
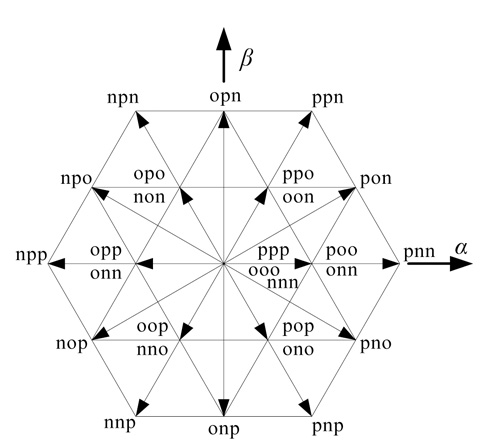
图2 三相三电平逆变器的空间矢量图
3 异步电机矢量控制理论分析
当使用三电平逆变器供电时,由于受中点电压浮动的影响,此时逆变器并非一个独立电源,而是一个和电机负载有关的受控电源,但可以抽象为如下讨论的数学模型。
三相电压输出和母线及中点电压间的关系为:

其中S矩阵为开关函数矩阵。设母线电压恒定,但上下电容电压不均衡,则有
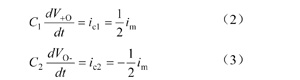
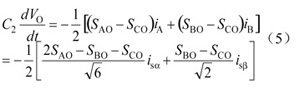
因此可以得到逆变器中点电压的微分方程:

再由2/3变换得:
电机负载中点N到变频器中点O的电压为:

电机三相相电压可表示为:

联合式(5)(14)就可以用一个五阶的微分方程组来描述二极管箝位三电平逆变器控制下的异步电机的工作行为。4 三电平逆变器的矢量控制
4.1 输出电压矢量选择与合成
为了确定参考矢量落在图3中24个小三角形中的具体位置,常用的方法是以参考矢量的长度和角度作为参数,与预定规则进行比较,从而判断参考矢量落在了哪个扇区哪个三角形。为此,首先要对参考矢量进行定义。由Park变换可定义电压的空间矢量为

则大矢量对应的幅值为 ,中矢量对应的幅值为
,中矢量对应的幅值为 ,小矢量对应的幅值为
,小矢量对应的幅值为  。具体确定过程如下:由参考矢量的幅角,即可确定其在哪一个扇区。因而有以下4种情况,如图3所示。
。具体确定过程如下:由参考矢量的幅角,即可确定其在哪一个扇区。因而有以下4种情况,如图3所示。
图3 小三角区域划分
其中令Vrefα和Vrefβ为参考矢量在直角坐标水平轴和垂直轴上的分量,Va为
 ,Vb为
,Vb为 ,即
,即

设参考矢量落入第I扇区,则可以根据以下三条规则,进一步判断参考矢量位于那个小三角形:
规则1:

规则2:

规则3:
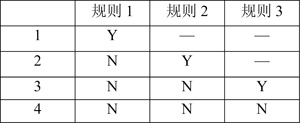
针对以上的规则,依据下面的表格,通过简单的算术运算,就立刻可以判断出参考矢量位于哪一个小三角形。
表2 各小三角形的判断规则
(1) Vref在1区,由矢量V1、V4和V0合成,作用时间分别为:
T1 = 2mTs sin(π/3-θ)
T4 = 2mTs sinθ
T0 = [1-2m sin(θ+π/3)] Ts(2) Vref在2区,由矢量V1、V2和V3合成,作用时间分别为:
T1 = [2-2m sin(π/3+θ)] Ts
T2 = [2m sin(π/3-θ)-1] Ts
T3 = 2mTs sinθ(3)Vref在3区,由矢量V1、V4和V3合成,作用时间分别为:
T1 = (1-2m sinθ) Ts
T4 = [1-2m sin(π/3-θ)] Ts
T3 = [2m sin(θ+π/3)-1] Ts(4) Vref在4区,由矢量V4、V5和V3合成,作用时间分别为:
T4 = [2-2m sin(π/3+θ)] Ts
T5 = (2m sinθ-1) Ts
T3 = 2mTs sin(π/3-θ)4.2 输出合成电压矢量时序
确定了合成参考矢量的矢量组合及各自作用时间,还要考虑矢量的发送顺序,也就是脉冲发送顺序。为了保证系统的安全运行,并尽可能减小谐波,脉冲发送的选择一般要遵循以下几个原则:
①每次切换开关时,只切换到相邻的开关状态,即只能,而不能直接。
②在一个采样周期Ts中,脉冲的发送以Ts/2为对称轴而对称发送。
③首发脉冲(首发矢量)的选择要考虑是否能够平滑切换到下一采样周期。
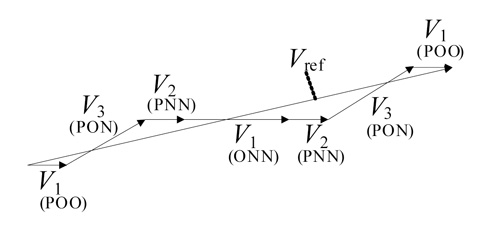
图4 矢量组合
根据以上原则,可以作出如图4所示的电压矢量合成方法。由V1、V2和V3、进行等效的第3小区域的Vref。各矢量的长度表示了其作用的时间长度。由原则②,将Vonn或Vpoo、V3和V2等分并以Ts /2为对成轴首尾相连。因Vonn等分后两段连在一起,所以仍然并成一个矢量画出。这样,参考矢量Vref被三个矢量以七段的形式等效合成。
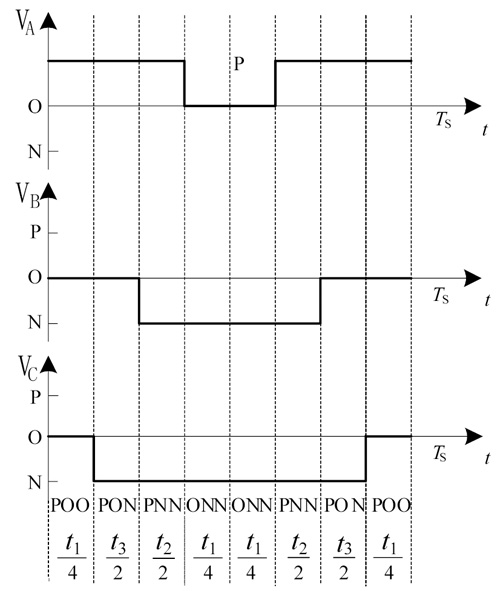
图5 输出电压矢量时序图
此时,可得到如图5所示的输出电压矢量时序图。这样,通过一系列的转换,将电压空间矢量的幅值和角度所携带的信息转化成了当前采样周期中的触发脉冲。根据类似的方法,可以得到当参考矢量落在各扇区所有小三角形中所对应的输出电压矢量。
5 系统仿真
根据上述的讨论和研究结合相应的数学模型,并充分考虑电压矢量所落区域的判断、空间电压矢量的合成及时序排列。在计算机上利用MATLAB7.0建立的仿真系统如图6所示。
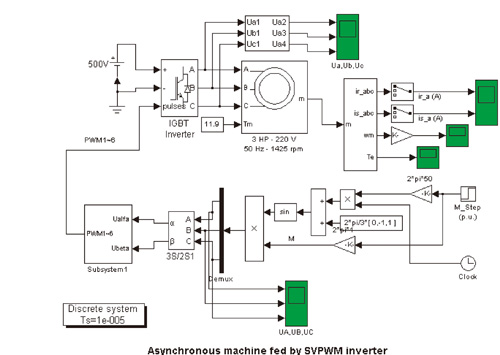
图6 三电平矢量控制逆变器仿真系统仿真所选电机是三相鼠笼式异步电动机,参数选择如下: P=3×746W,Ul-l=220V,f=50Hz,Rs=0.345Ω,Lls=2.2×10-5Ω,Rr=0.816Ω,Lr=2×10-5Ω,J=0.089kg*m2,负载。仿真结果波形如图7、图8所示。

图7 三相电压PWM波形
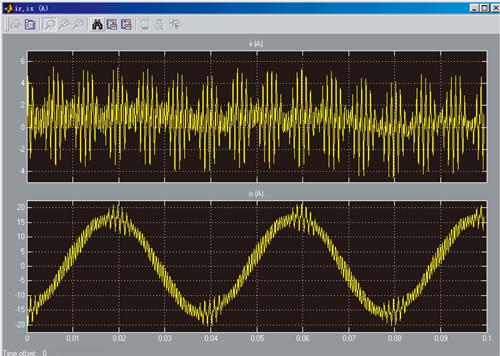
图8 转子、定子侧相电流波形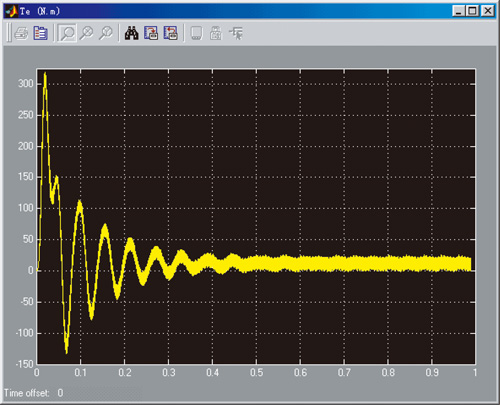
图9 转矩波形由仿真可知采用三电平矢量控制方式的异步电动机交流其调速系统通过适当矢量合成及时序控制算法之后,其仿真效果与其他变频器供电的变频调速系统相比,电流谐波显著减少,效率大大提高,转矩脉动也相应减少,逆变器输出线电压基波最大值为直流侧电压,比普通SPWM逆变器输出电压高15%。
6 结论
基三电平逆变器的异步电机矢量控制在参考电压矢量所落区域的判断、空间电压矢量的选择与合成等方面都比较复杂,而目还存在中点电位的平衡问题,但只要依据数据模型进行慎重选择矢量的合成输出方式,优化并改进数字控制系统的算法,三电平矢量控制变频技术必会在变频控制领域得到更加广泛的应用。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号