



.jpg)



当前位置:首页»案例
- 智能弧焊机器人离线编程和视觉功能应用
-
企业: 上海发那科机器人有限公司 日期: 2008-12-29 领域: 传感器 点击数: 246 摘要:本文介绍FANUC弧焊机器人全新的机器人安装调试方法,通过离线示教,然后利用视觉设定TCP,再用视觉标定工件实际位置,用视觉偏移功能来自动微调示教程序,极大地提高了编程效率,体现高度的柔性化。
前言:
当前6轴弧焊机器人的安装流程普遍采用的方法是:TCP设定、现场示教、确认及修改所示教的程序。而在批量生产时,这种方法要求工件的定位达到很高的精度。另外,当工件变换,或者同种工件由于型号的不同,会有部分甚至所有的焊缝位置有变化时,就需要编程人员在现场针对不同型号的工件长时间进行示教工作,严重影响工作效率。
现在,我们可以利用FANUC公司开发的机器人仿真软件ROBOGUIDE,坐在办公室里,就能很轻松地完成大量的编程和示教任务,而且是完全基于三位模型的基础上,利用虚拟的示教器进行示教,然后再把编好的机器人焊接轨迹下载到机器人控制器。由于,实际的工件相对于机器人基坐标系的位置与仿真软件中相比会有误差,需要对实际的工件进行位置重新确认。这时我们可以在机器人手臂末端临时安装一个视觉相机,来观察和标定工件空间位置。最后用弧焊机器人软件包中的视觉偏移功能可以依据标定的工件空间位置对仿真软件中示教的程序自动进行微调。
具体步骤如下:
1. 离线编程
ROBOGUIDE仿真软件支持igs格式的三维数模导入,目前流行的三维软件都支持输出igs格式文件,因此给这款仿真软件数模的导入带来了极大的方便。
在这个软件中示教焊接轨迹,除了可以模仿实际示教时常用的示教点的方式,还可以用鼠标直接在工件的三维数模上点选出焊缝处的工件轮廓线,产生的线条可以直接作为机器人TCP运行的轨迹,并自动产生示教点和轨迹程序,这是这款仿真软件的一个独特而又非常实用的功能,可以大幅减小示教时间。由于形成的焊接轨迹刚开始只代表TCP点的路径,接下来可以在仿真软件中设置焊枪的姿态。当所有焊缝路径调整好后,机器人可以将整个焊接运动以动画方式展示,不满意的路径或焊枪姿态可以进行修改。如图1所示: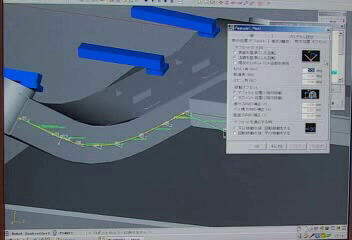
2. 下载示教程序
将示教好的轨迹程序下载到机器人控制器。同样,如果有需要,机器人控制器中现场的示教程序同样可以上载到仿真软件中,还可以对示教程序进行各种修改,再下载到机器人控制器中。3. 用视觉来设定TCP
这里采用视觉功能来设定TCP,速度快,精度高。将摄像头安装在固定的基础底板上,焊枪在摄像头前摆动若干不同姿态,摄像头拍摄焊丝端点图像,系统自动计算焊枪TCP点。如图2所示的实验装置。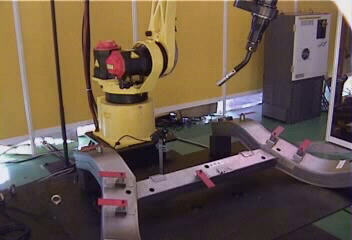
4. 安装临时摄像头
将摄像头临时固定在机器人第六轴末端或者焊枪上,只要固定牢固,其具体位置不需要精确。如图3所示。
5. 摄像机标定
摄像机安装好后,机器人需要以工件上某特征点为参考点,运动至两个以上的位置,对参考点拍摄,软件可以标定摄像机的成像几何模型。6. 工件参考点标定
在工件上选定适当的三个特征点,用来标定工件的位置。摄像机分别在每个特征点上做两次不同位置的取像,从而计算出工件上这三个特征点在机器人基坐标中的坐标参数,从而得出工件的空间位置。这里以工件的三个基准孔做参考点。如图4和图5所示

7. 用视觉偏移功能来微调程序
前面的步骤都做完后,就可以用FANUC智能弧焊机器人软件包中的Vision Shift对仿真软件所制作的示教程序进行自动调整。
以上的步骤,可以用下面的见图表示: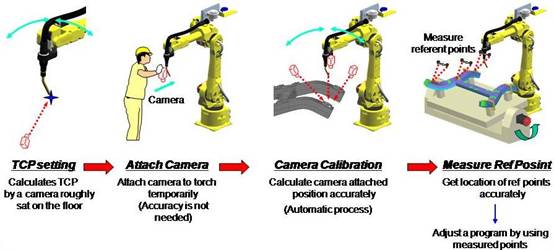
结论:
这种利用离线编程和视觉相结合的示教方法,完全可以应用到实际的生产当中,特别是需要现场长时间示教以及工件型号多样、批量大的场合,以及工件定位不准确的场合,例如,运动在输送线上事先已经点焊好的工件。
FANUC公司开发的iRVision视觉系统,无论是硬件还是软件都与机器人控制系统高度集成,省去另外设计视觉系统的花费。而且此视觉功能还可以在线切割、涂胶、切边等领域进行相应的开发应用,缩短机器人安装调试的时间。在当前企业需要提高生产效率和生产质量、降低人力消耗的趋势下,一切高度柔性化和自动化的方案都应该是我们优先考虑的。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号