



.jpg)



当前位置:首页»案例
- 新一代西门子起重机电气控制系统
-
企业: 西门子制造工程中心有限公司 日期: 2009-07-12 领域: 工业安全 点击数: 3192 
陈忆文 (19-)
男,湖南湘潭人,学士学位,电气工程师,现就职于西门子工厂自动化工程有限公司上海分公司起重机部门,从事电气设计与调试工作。
摘要:西门子在起重机的发展中逐渐形成了对起重机电气控制的一整套解决方案,本文介绍新一代的西门子起重机电气控制系统及其在桥吊中的的应用。
关键词:SIMOCRANE;桥吊;主从控制;起升系统;行走系统;轴;工艺
Abstract: During the progress of cranes development, Siemens makes a series solution
to improve its capability. This paper introduces a new electrical control system of crane
designed by Siemens and its application for STS.
Key words: SIMOCARNE; STS; Master-slave control; Hoisting system; Moving system;
Axes; Technology
1 概述
在经济全球一体化的时代,在生产规模不断扩大的时代,在物资转运越来越频繁的时代,起重机发挥着越来越重要的作用,对起重机的性能也提出了越来越高的要求。在起重机的发展历程中,西门子一直是起重机电气控制系统的引领者和行业标准的制定者。随着对起重机系统性能要求日益提高,西门子开发了一套全新的起重机电气控制系统—SIMOCRANE。该系统沿袭了以往控制系统业已成熟的结构模式,主要由供电系统、起升系统、行走系统(小车机构,大车机构)等组成,但电气控制系统发生了较大的改进,由PLC+SIMOTION+drive控制模式代替了原来的PLC+drive控制模式,SIMOTION可以直接控制驱动器,且控制速度比PLC快了一个数量级,这使得驱动器可以更快速地跟踪控制命令,控制器也可以更实时地监视系统运行状态。西门子还开发了与该系统配套的辅助系统,可以无缝集成在主系统中,比如运用在桥吊和卸船机中的防摇系统。
本文以西门子在上海振华港机Antwerp项目港口起重机的电气控制系统为例介绍新系统的构成以及在STS中的应用。
2 系统构成
2.1 硬件构成
系统主要由PLC、SIMOTION D、CF卡、SINAMICS、ET200、DP通讯线路等构成。由于对驱动器的控制部分功能转移到了SIMOTION D,对PLC的要求大大降低。SIMOTION基本上处理了与驱动器有关的所有功能,PLC主要处理外围设备的功能和起重机的整体运行。PLC与SIMOTION D之间通过DP通讯交换信息,而SIMOTION与SINAMICS或者集成在一起,或者通过SIMOTION整合的内部通讯系统DRIVE-CLiQ交换信息。PLC与驱动器SINAMICS之间不再直接交换信息,而是通过SIMOTION D进行。图1为Antwerp项目STS硬件组态图,主系统使用了1个CPU 319F,变频器的直流供电模块ALM(站号40)和SIMOTION D435(站号44,45)以及其它一些外围设备通过PROFIBUS总线挂接。
SIMOTIN D系统的组态如图2所示,集成了一个SINAMICS_Integrated再挂接了两个SIMOTION_CX32驱动控制器。挂接驱动器的数量根据起重机的需要而定。在Antwerp项目中使用了8个驱动器,因此使用了三台驱动控制器。
CF卡中包含了固件版本信息和起重机专用功能以及其它相关功能的授权:
SIMOTION MultiAxes(适用于运动控制);
SIMOTION IT(适用于网络服务器的远程诊断和起重机专用功能);
SIMOTION Crane Basic Technology(用于“crane DCC-Library”中的功能)。
SIMOCRANE系统只有在安装这些授权的情况下才能正常运行。
2.2 软件构成
PLC和SIMOTION D中都已采用结构化程序模式,不同的机构对应各个程序块。用户可按照自己的需要和习惯来编写PLC中的程序,并通过程序与SIMOTION交换数据,从而达到向SIMOTION的下达驱动的动作命令和速度设定值信息,并从SIMOTION取得驱动的实时信息。
图1 STS硬件组态图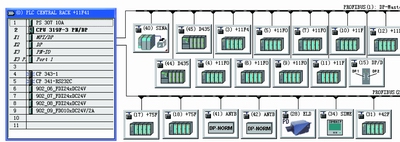
图2 SIMOTION D系统组态图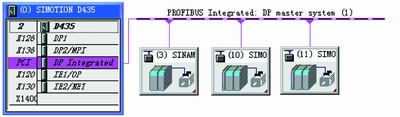
SIMOTION D把起重机的控制划分成几个子部分,每一个部分负责起重机的一个机构。各个机构分别是:起升机构(Hoist),小车(Cross Travel),大车(Long Travel),俯仰机构(Boom),支撑/开闭机构(Holding and Closing Gear),回转机构(Slewing Gear)。各个机构程序的主要功能体现在二个函数库中:Crane DCC-Library (与驱动相关)和Crane FB-Library(与流程控制相关)。根据不同用途的起重机组合使用各个机构,比如STS中就使用了起升、小车、大车、俯仰四个机构,而RMG(轨道吊)中只须使用起升、小车、大车三个机构。
各个机构的程序结构基本如下:由三个函数组成,一个函数进行PLC与SIMOTION D之间的信息交换,一个函数进行SIMOTION与SINAMICS之间的信息交换,还有一个函数进行信息处理。
3 硬件系统组态
3.1 PLC的组态
在硬件组态视窗中选择一个需要的PLC CPU模块,例如Antwerp项目选择CPU 319F模块,插入相应的I/O模块,然后构建一个由PROFIBUS总线组成的系统,再把需要使用的外部设备及其I/O模块挂接在总线上,将SIMOTION D及其组件组态为一个DP智能从站。图3所示为Antwerp项目硬件组态,从中可以看到,这个系统除CPU及其包括扩展的I/O模块(ET200)和组态好的SIMOTION D站外,还有绝对值编码器、高压信息检测表、起重机状态信息显示表、重量测量系统、总线信息交换器等设备。
图3 硬件组态示意图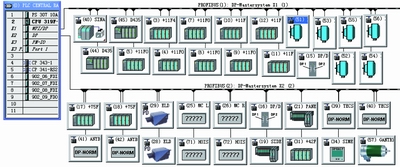
3.2 SIMOTION D的组态
SIMOTION D的组态过程是先组态SINAMICS控制器,然后组态SINAMICS驱动轴,最后组态SIMOTION工艺轴。下面以Antwerp项目驱动器的设置为例进行简单说明:在SCOUT软件中,如图4(a)所示,先在控制器SINAMICS下插入驱动器(Insert drive),然后按照提示一步一步对驱动器的类型(伺服还是矢量),控制模式,所接入的电机型号,所接入的编码器型号,通讯格式等进行设置。设置好后系统会生成一个完整的驱动系统。然后,按此步骤设置好其它的驱动系统。每一个SINAMICS控制器最多可以配置4个驱动。在Antwerp项目中总共使用了三个SINAMICS控制器,一个是集成在SIMOTION D中的,另两个通过DRIVE-CLiQ接入SIMOTION D控制器。这三个控制器总共配置了八个驱动轴,如图4(b)所示为其中的一个控制器配置的三个驱动轴。配置好后可以通过SINAMICS下的Topology查看该控制器及其所连接的设备的拓扑结构图。

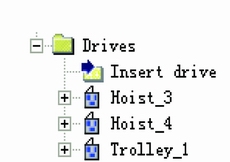
(a) (b)


(c) (d)
图4 SIMOTION D 组态示意图
驱动轴配置好后再配置工艺轴,将配置好的驱动都连接到适当的工艺轴上,SIMOTION通过对工艺轴的控制来控制驱动。如图4(c)所示,在AXES下插入轴(Insert axis),然后选择控制模式(速度、位置、同步),然后按照提示一步一步设置轴的类型(直线轴还是旋转轴)(电气轴、压力轴还是虚轴),电机类型(标准电机还是直线电机),轴测量系统所使用的单位(如长度m、mm、km、ft等,时间s、min、h等,加速度m/s等,加加速度,角度等),编=码器测量方式,选择驱动轴,通讯格式,使用哪个编码器及编码器类型等。设置好后一个轴就配置好了。注意在这个配置之后有些内容在配置结束以后是不能更改的,例如控制模式,编码器测量方式。如果一定要改,只能删掉工艺轴并重新配置。在Antwerp项目中总共配置了八个工艺轴轴,如图4(d)所示。在SIMOTION D中,还可以设置其它工艺轴。例如实现主-从控制的轴。
4 控制结构
工艺轴配置好后,下一步就是如何控制这些轴。只要这些轴按照要求动作,就完成了起重机的相关功能。例如对起升工艺轴的控制就完成了起升功能。下面看看工艺轴的结构。
每一个工艺轴都对应一个MCC单元和DCC单元。每一个MCC 单元中都具有两个MCC程序。一个程序执行周期较长,它和PLC通讯;另一个程序执行周期较短,它和SINAMICS通讯,并设一个单独的MCC单元对当前轴的状态进行监控。在这些程序中,根据控制的需求调用库“Crane FB-Library”中的功能块。
除了小车、大车和主从力矩控制中的从机,所有工艺轴的结构基本相同。但不管怎样都是在MCC 程序中调用其他功能块(库中的功能块),且调用结构形式相同。下面以在Antwerp项目中起升和大车的单元结构为例进行说明。
图5 慢周期起升机MCC程序结构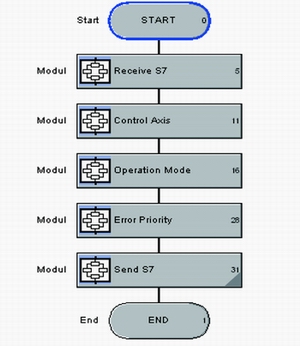
图6 慢周期大车机构MCC程序结构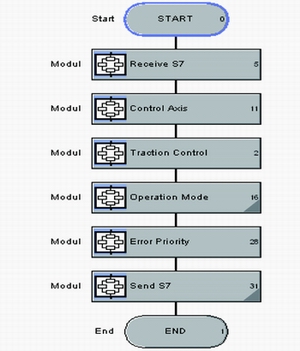
图5所示为慢周期起升机构MCC程序的结构,图6所示为慢周期大车机构MCC程序的结构。可以看出,两个单元结构略有不同。
各功能块的作用:
Receive S7: 从SIMATIC S7接收数据。这些数据会在DCC中进一步处理。
Control Axis: 设置驱动对象和工艺对象中的控制字和状态字。
Traction Control: 读取电机编码器和外部编码器的实际速度。其结果在DCC中继续处理。
Operation Mode: 管理操作模式和执行运动指令。
Error Priority: 读取工艺对象、驱动对象和功能块的故障和报警。
Send S7: SIMOTION发送数据到SIMATIC S7。
图7为快周期各机构MCC程序的结构,各个机构的单元结构都是一样的。
各功能块的作用:
Receive Sinamics: 读取驱动器的数据到SIMOTION。
Send to Sinamics: SIMOTION发送数据到驱动器。
DCC单元的功能:根据各种条件计算速度、加速度、计算最终发送到驱动器的数据。
图7 快周期各机构MCC程序结构
5 附加功能及发展
为了适应技术的发展和起重机的新要求,在系统中附加了一些辅助的功能,将来可能成为基本功能,如防摇系统。随着时代的发展,将来可能有更多更好的功能加入其中,比如起重机自动运行系统,模式识别功能。不久的将来,起重机控制系统功能必将更加强大和完善。
参考文献
[1] 贾大山. 2000~2010年沿海港口建设投资与适应性特点[J]. 中国港口,2008(3).
[2] 潘爱华. 起重机起升机构电动机的应用[J]. 起重运输机械,2007(7).
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号