



.jpg)



当前位置:首页»案例
- 锅炉系统的神经模糊智能控制研究
-
企业: 控制网 日期: 2009-11-23 领域: 工业安全 点击数: 1114 
张飞云(1976-)
女,河南周口人,讲师,硕士,主要从事信号与信息处理方向的研究。
摘要:将神经网络与模糊集相结合形成一类新的智能信息处理方法,利用神经网络的并行运算能力来实现模糊规则的快速推理,并用学习算法在线调整规则。通过在锅炉系统的仿真研究,证明了该系统的良好性能。
关键词:神经模糊控制;神经网络;模糊逻辑;仿真
Abstract: A new intelligent information process method which combines neural networks with fuzzy logic is presented in this paper. The fast reasoning of fuzzy rules are realized with parallel operation of neural networks, and rules are adjusted online with study algorithm. The simulations for oven system show its satisfied performance.
Key words: Neural fuzzy control(NFC); Neural network; Fuzzy logic; Simulation
1 引言
模糊控制系统具有鲁棒性强,结构简单,可处理模糊语义信息等特点,而神经网络适用于处理精确数据信息,并具有并行处理、自学习自适应等特点。由于神经网络可并行存贮和处理大量的控制规则,实行规则的并行推理,节约推理时间,因此将神经网络与模糊集相结合形成一类新的智能信息处理方法[1]。由于电锅炉越来越多的走进人们的生活,锅炉的温度控制具有一定的现实意义,文中通过对锅炉的温度控制研究神经模糊智能控制系统的良好性能。
2 神经模糊智能控制系统
神经网络模糊智能控制系统[2](NFCS?—Neural network fuzzy control system)如图1所示。
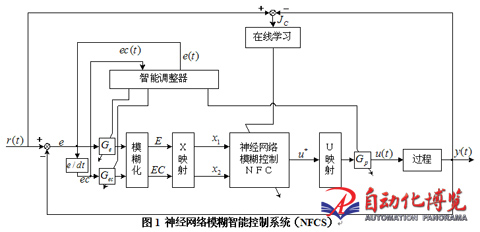
NFCS利用神经网络的并行运算能力来实现模糊规则的快速推理,并用学习算法在线调整规则。使其具有自学习、自适应能力。神经网络的输入分别对应于输入误差和变化量的模糊集分区,输出为连续值,这样无需去逆模糊化处理。
3 神经网络模糊控制的训练数据预处理
本文作者以实际锅炉为控制对象,作者对系统中温度的模糊数据做如下处理:设输入量取温度误差E和误差变化EC,控制量为U,各量的Fuzzy模糊集选取为:
3.1 Fuzzy集的选取
温度误差E={NB,NM,NZ,PM,PB},温度误差变化 Ec={NB,NM,NZ,PM,PB},其中各符号的意义对应如下:
E=Ec={负大,负中,接近0,正中,正大}
选择控制变量的Fuzzy集为:控制量V={NB,NM,NS,ZO,PS,PM,PB},各符号的表示意义为:
V={负大,负中,负小,接近0,正小,正中,正大}
3.2 论域的选取
温度误差E和误差变化EC的论域如下:E=Ec={-5,-4,-3,-2,-1,0,1,2,3,4,5} ,
控制量U的论域如下:
V={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
3.3 Fuzzy集中各语言变量赋值
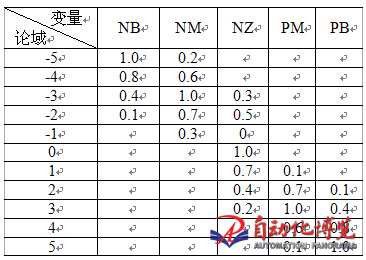
根据系统数据的规律对温度误差和误差变化量论域中语言变化采用离散形隶属函数。结合课题研究中用到的实际温度变量,温度误差和温度误差变化率赋值如表1所示。
表1 误差和误差变化赋值表
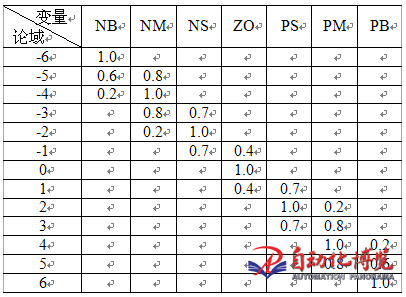
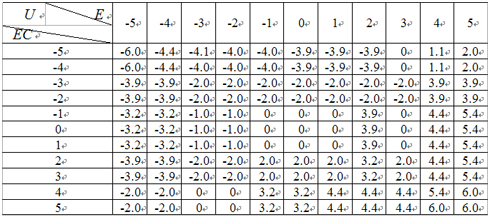
系统中控制量输出论域中语言变化也采用离散形隶属函数,其赋值如表2所示
表2 控制量赋值表
3.4 控制规则与控制样本
根据具体的实验数据和经验总结如表3所示的控制规则集。
表3 控制规则表
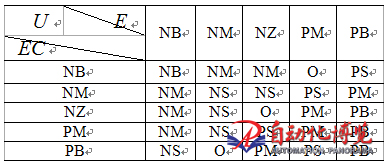
表4 控制样本表
根据表3的控制规则表,利用Zadeh极大—极小合成法,可得如表4所示的控制样本表。
4 神经网络模糊控制器结构及训练学习算法
对抽象出来的模糊控制表用作神经网络的学习样本,用这些样本对NFC进行离线训练,利用NFC的记忆与联想功能实现温度的连续模糊控制。训练过程如图2所示:

4.1 NFC的结构
对于表4提供的121个学习样本,为了尽量减少神经元个数并兼顾到允许的学习误差,设计采用2—6—6—1结构的四层ANN,输入层二个节点,中间两个隐层各6个节点,输出层一个节点,如图3所示,在图中,网络输入节点Xi(1)(i=1,2),对应模糊控制器输入(E,EC),输出节点为U*,对应控制量[3-5]。
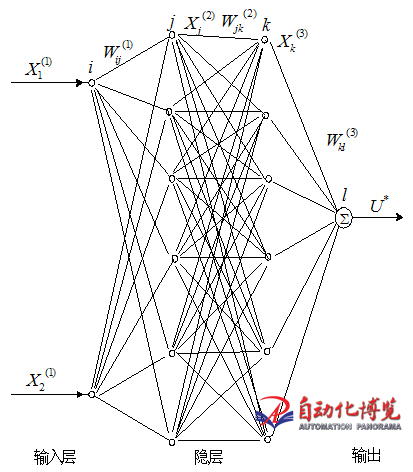
图3 ANN的结构
网络的输入—输出映射关系:
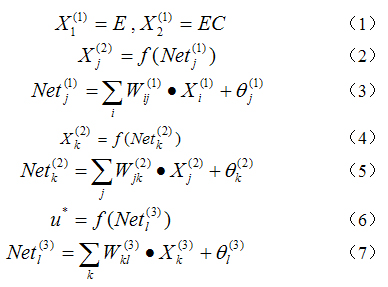
在式(1)~(7)中,W (L)表示第L层到L-1层之间的连接权值,X i(L) 表示第L层到第 i 个神经元的输出, 表示第L层第j个节点的阈值。
表示第L层第j个节点的阈值。

4.2 网络学习算法
定义误差函数:
在式(9)、(10)中ud表示期望输出,u*表示NFC网络的实际输出。为使误差函数最小,可用梯度最速下降优化算法[6] 训练网络权值W (L):
式(11)中, 为自适应学习率, a为动量因子。
为自适应学习率, a为动量因子。
4.3 NFC神经模糊控制器离线训练
在离线训练NFC网络时,需要把输入变量(X1,X2 )输出变量从u* 变换到[0,1]之间。
通过X映射变换,主要任务是将模糊控制表中的论域[-6,+6]映射到[0,1]之间。采用公式:
通过U映射变换,主要任务是将NFC的网络输出量u* 从[0,1]变换到[-6,+6]之间。采用公式:

4.4 在线学习控制
神经网络模糊控制器在学习过程中,包括离线学习和在线学习控制两部分,离线学习只是使控制器掌握基本技能,而在线学习则强调在运行中根据控制指标要求,自动修改控制参数逐步改善控制的工作状态。离线学习只是学习过程的初级阶段,而自学习过程是在离线学习的基础上提高的过程,训练和自学习两方面相互依赖,只有两方面有机结合才能够控制复杂多变的系统[7]。NFC经过离线训练后,可投入连续模糊控制,当对象环境发生变化,为了能够跟踪期望的给定信号,我们可在修正NFC中的权值W(t),使被控系统的输出逼近期望的给定值,达到自学习的目的。
5 仿真研究及结论
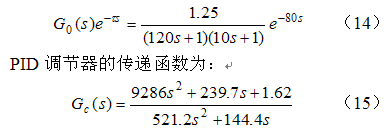
锅炉系统通常表现为二阶滞后特性,文中以二阶滞后系统为研究对象,分别在PID控制和NFC控制下进行MATLAB环境仿真,用以验证文中设计系统的控制性能[8]。设已知广义被控对象的数学模型为:
PID控制和NFC控制下的阶跃响应分别如图4曲线①、曲线②所示,在PID控制作用下,系统具有超调,超调量 ,峰值时间tp=175.49,调节时间tp=332.01,在NFC控制下,取
,峰值时间tp=175.49,调节时间tp=332.01,在NFC控制下,取 ,
, ,系统阶跃响应曲线超调很小,快速性更高,取得很好的控制性能。
,系统阶跃响应曲线超调很小,快速性更高,取得很好的控制性能。
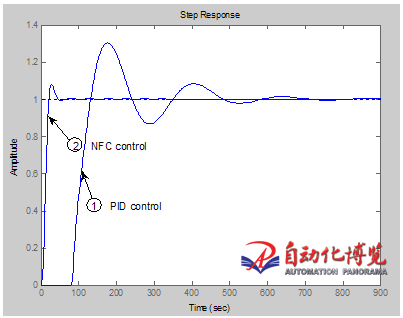
图4 PID控制和NFC下阶跃响应曲线
模糊系统善于直接表示逻辑,适于直接表示知识,适于自上而下的表达,神经网络长于学习通过数据隐含表达知识,适于自下而上的学习过程,二者存在一定的互补、关联性[9]。模糊控制和神经网络通过相互融合,可以取长补短,提高控制系统的智能性。仿真结果表明了系统良好的控制性能。其它作者:
王 武(1978-),男,甘肃兰州人,讲师,硕士,主要从事控制理论与控制工程、智能控制方向的研究。
赵正印(1980-),男,河南淅川人,讲师,硕士,主要从事高能物理和电工电子方向研究。
参考文献:
[1] Kosko B.Neural Networks and Fuzzy Systems[M].Pren-tice.Hall,Englewood, Cliffs,1992.
[2] 王耀南. 智能控制系统——模糊逻辑、专家系统、神经网络[M]. 长沙: 湖南大学出版社,1996.
[3] Fu KS.A Heuristic approach to reinforcement learning control system[J]. IEEE Trans.1965.
[4] Narendra K S,Parthasarathy K.Indentification and Control for Dynamic Systems Using Neural Networks[J].IEEETrans,NeuralNetworks,1990,(1):4~27.
[5] Narendra K S.Intelligent Control IEEE Control System Magazine[J]. 1991,1:39~40.
[6] 李界家,片锦香,朱栋华等. 基于小波神经网络辨识器的模糊神经自适应控制在VAV空调系统中的应用[J]. 仪表技术与传感器,2004(7): 37~52.
[7] Buckley J J,Hayasi Y.Fuzzy neural networks: A survey. Fuzzy sets and systems[J]. 1994, 66(1):1~13.
[8] 刘金琨. 先进PID控制及MATLAB仿真(第2版) [M]. 北京: 电子工业出版社,2004.
[9]李士勇. 模糊控制、神经控制和智能控制论[M]. 哈尔滨: 哈尔滨工业大学出版社,1996.
信息来源:自动化博览
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号