



.jpg)



当前位置:首页»案例
- 基于单片机的液体点滴速度监控的研究
-
企业: 控制网 日期: 2009-11-24 领域: 工业安全 点击数: 5231 
陈巍(1970-)
男,江西抚州人,硕士,讲师,主要从事电子教学及研究。
摘要:本文针对全国大学生电子设计大赛运动控制试题之一《液体点滴速度监控》的控制要求,提出了一种基于单片机和步进电机液滴自动监控的研究方法。考虑到控制的可靠性及精确性,在软件设计中使用了PID软件算法进行液滴速度的测算,形成一个闭环传递控制系统实现精确的控制。
关键词:光电传感器;PID算法;步进电机;单片机;液晶显示
Abstract: Aiming at the controlling requirement of the Monitoring of Dropping Rate of Liquid, one of the motion control test questions of National Undergraduate Electronic Design Contest,this paper offers a research method of the automatic monitoring based on SCM and stepper motor. In view of the reliability and accuracy of the control, PID software algorithm is used in software design to measure and calculate the dropping rate, and a transfer system with the closed loop is formed to realize accurate control.
Key words: photosensor; PID algorithm; stepper motor; SCM; liquid-crystal display
1 控制要求概述
2003年全国电子设计大赛F题为设计并制作一个液体点滴速度监测与控制装置,要求:
(1)如图1所示,滴斗处检测点滴速度并制作一个数显装置,能动态显示点滴速度。
(2)通过改变储液瓶高度控制点滴的速度控制,点滴速度可以用键盘设定并显示,设定范围为20~150滴/分。
(3)当液面高度降到警戒值(2~3cm),能发出报警信号。
(4)设计并制作有主站控制16个从站的有线控制系统。
根据上述要求将任务分解为:液滴检测任务、液滴速度控制任务、液面过低报警任务、主站从站通信任务。本论文将根据上述任务从如下几个方面对其进行阐述:
a 系统的总体硬件结构设计将以硬件结构图的形式予以阐述,以控制核心为主体,进行输入与输出的分析并从硬件的选择包括检测装置,液晶显示和通信传输装置进行阐述。
b 软件设计主要从系统流程的设计,算法的实现等方面进行分析和阐述。
c 结果分析
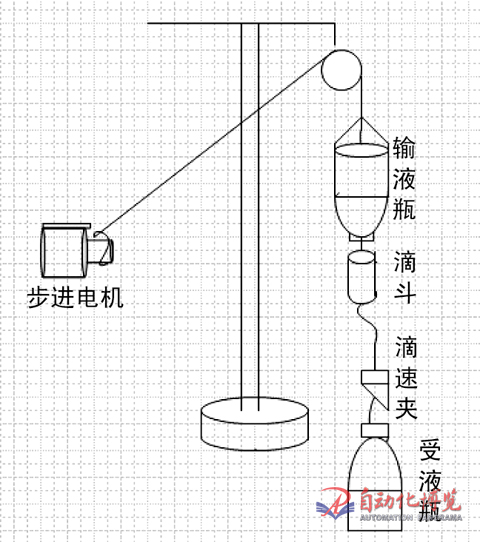
图1 点滴装置示意图
2 硬件结构设计
本设计是基于STC89C52单片机为控制核心,通过步进电机控制输液瓶的高度来实现液体滴定的速度,利用光电开关实现对液滴速度的检测并将相关数据显示在液晶显示屏上,当液面降至禁戒线时发出声光报警。硬件结构框图如图2所示。
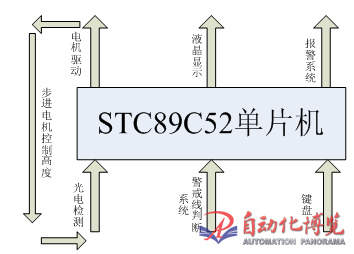 图2 总体硬件设计框图
图2 总体硬件设计框图
2.1点滴速度控制
该点滴装置采用步进电机来调节输液瓶的高度,由于步进电机精度高,无位置累积误差,可靠性高等特点,能够满足其控制滴斗中液滴滴下速度的精确性要求,因其可以通过电脉冲来改变步进电机的步进角精确实现输液瓶的高度控制从而实现点滴速度控制。此系统采用L298对步进电机进行控制,电机控制模块硬件图如图3所示。
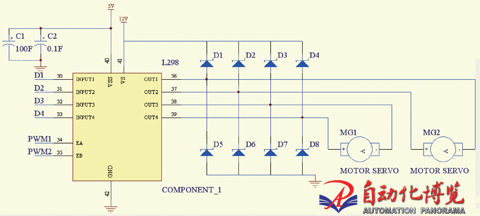
图3 电机驱动模块原理图
2.2 液滴速度检测控制
选用光电开关进行液滴的速度检测,其优点是测量范围远,灵敏度高;将光电开关安装在滴斗壁上,当液滴滴下时,会给光电开关产生一个信号,通过在一分钟内采集数个信号所用的时间就可以计算出液滴滴下的速度。其工作原理如图4所示。
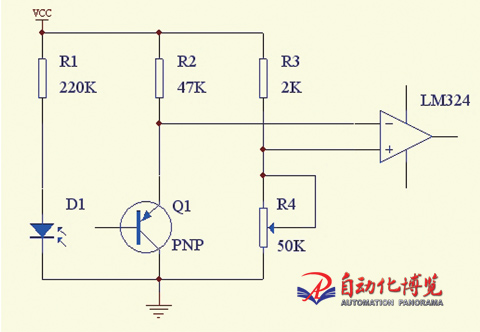
图4(a) 光电开关原理图
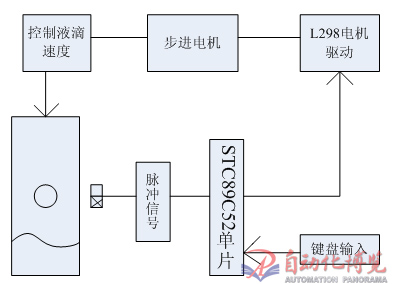
图4(b) 利用光电开关检测液滴速度
2.3 单片机通信总线
主站与从站之间通信总线采用485总线,通信接口芯片采用SN75LBC184,实现STC89C52的异步串行接口与RS232C标准串行通信电路之间的电平转换,通信电路可以将16个输液从站与主站的主机:连接起来构成输液监控网络,从而实现输液的遥测,遥控。
2.4 液晶显示模块
利用1602液晶显示如图5所示,其优点是显示直观,内容丰富;其用来显示液滴滴速和显示报警信息。

图5 液晶显示原理图
2.5 键盘设计
本设计采用的是4*4扫描键盘,其由四条I/O线作为行线,4条I/O线作为列线,在行线与列线的交叉点上设置交叉点,使其形成矩阵式排列,如图6所示。
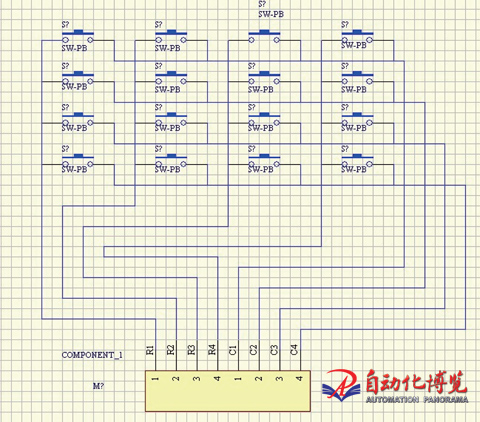
图6 矩阵键盘原理图
2.6 警戒线检测
利用光电开关对输液瓶中液体进行检测,当高度低于警戒值给单片机发送报警信号。将光电开关安装在输液壁上,当液面高于警界线时,会给光电开关产生一个信号,使其保持高电平,当没有接收到信号时,产生低电平,从而予以报警。如图7所示。
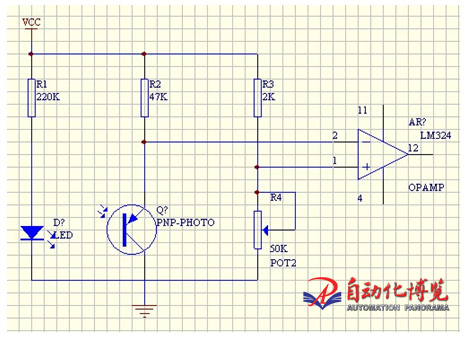
图7 光电传感器检测原理图
3 软件的算法及软件设计
3.1 液滴速度的算法
控制输液瓶的高度来控制液滴地下的速度,假设滴斗到储液瓶的高度为H1且滴速夹固定不变,如图8所示。
由图中所示可以得到液滴在高为H1处落下所产生的压强的物理公示:
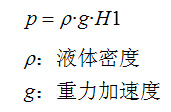
考虑到滴速夹,输液管的摩擦等原因,将影响到理想情况下的液体压强,假设所有阻尼为f,假设在管子的某个截面上产生了重力引起的压强和一个向上的阻尼,经过多次的实验测试,可以得到其重力引起的压强和阻尼之间存在着线性关系,从而对液滴速度产生影响。

图8 系统框图
根据功率可得方程:
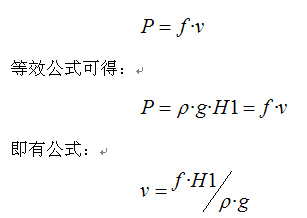
由上式可以得到滴速v的表达式,其中f受管道摩擦和滴速夹影响,所以要保证f不变就必须保证滴速夹固定不变。
3.2 采用PID算法调速
要得到H1与液滴速度v之间的关系,需要用到PID算法,此算法能够解决复杂的工程计算。其实质是根据输入的偏差值,按一定的函数关系进行运算,其运算结果用以控制输出。
在此系统中,PID采用差分方程表示:
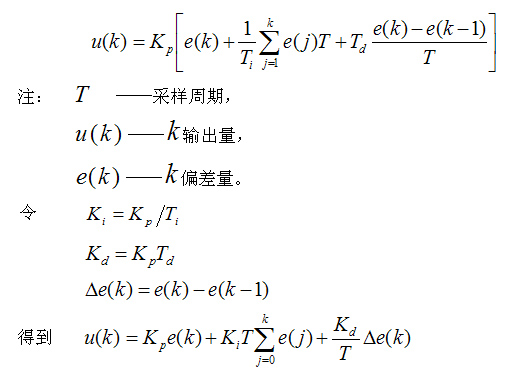
通过上式可以求得其输出控制量 u(k) 对应于系统的输出y(位置),是全量输出,形成了一个闭环传递函数,系统框图如图8所示。

图9 位置型PID算式
3.3 点滴周期算法
通过采集几个相邻间隔脉冲信号周期Ti,平均得到相邻间隔脉冲信号的周期T,这样就可以得到点滴速度
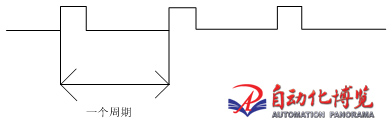
图10 点滴速度测量
3.4 电机驱动设计算法
此系统采用L298对步进电机进行控制,可以通过电脉冲来改变步进电机的步进角,且能提供步进电机所需负载。用过该步进角来改变输液瓶的高度从而实现液滴速度的改变。通过集成芯片L298可以直接驱动步进电机。本系统中使用的步进电机所需要的脉冲电流幅度是0.6A,电压幅度是12V,绕组阻抗是20Ω,力矩为8.5 Kg×cm,力臂40mm。通过集成芯片L298可以直接驱动步进电机。单片机输出四路脉冲信号控制电动机转动相位角。单片机产生四相四拍脉冲信号的波形如图11所示。
3.5 点滴速度检测算法
以每分钟记录点滴数。通过乘法计算出点滴速度,此方法在点滴速度恒定的情况下,可以采用多个单位时间取均值,从而求得单位时间的平均点滴数,这种方法可以实现较高的精度。设T=200ms,当检测到第一个到来的脉冲信号时,程序进行中断处理,将计数器存储内容读出,再将计数器清零作为记录脉冲信号的,当定时器定时到达200ms时,程序中断检测输入信号是否有脉冲信号到来,同时计数器加1,另外设定计数器记录检测到的脉冲信号个数,设定计数器的存储单元是10,这样可以通过循环存储脉冲个数。在定时器中取出5个相临脉冲信号点这样就能计算出5个脉冲点所需要的时间为:

其中sum=n2-n1根据上面的理论分析和计算,得到点滴速度测量的程序框图如图12所示。
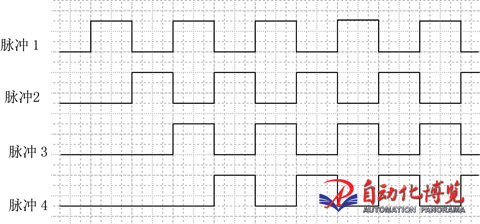
图11 四相四拍脉冲信号
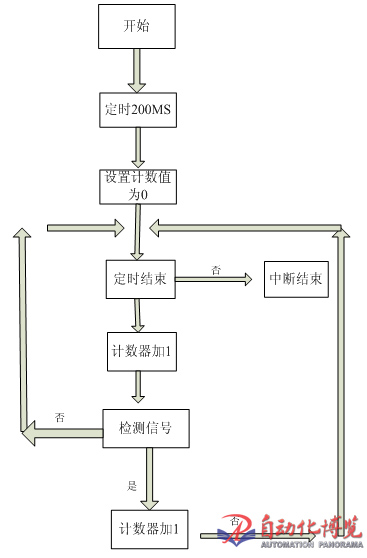
图 12 点滴速度测量
4 测速结果及结果分析
表1

由表格中数据可见,该电路可靠性高,误差小,主要得益于步进电机的精确控制和软件算法的合理运用,所以只要选用的测试方法合理,控制方案及调节手段合适完全可以得到良好的控制效果。参考文献:
[1] 陶永华等.新型PID控制及其应用[M].北京: 机械工业出版社.
[2] 王治刚.单片机典型系统设计[M].北京: 电子工业出版社.
[3] 张爱萍.硬件电路设计原理[M].哈尔滨: 哈尔滨工业大学出版社.
[4] 张伟.Protel 99SE高级应用[M].北京: 人民邮电出版社.
信息来源:自动化博览
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号