



.jpg)



当前位置:首页»案例
- 驾驶员模型汽车防撞雷达安全预警算法
-
企业: 控制网 日期: 2009-12-22 领域: 工业无线 点击数: 274 
江路明(1963-)
男,江西遂川人,副教授、工程师。主要研究方向为电子信息及自动化技术。2007年获江西省高等学校中青年骨干教师。
摘 要:根据汽车主动避撞雷达系统中保障安全和及时预警两方面的实际要求,比较了各种报警算法,在结合汽车制动过程运动学分析的基础上,引入了一种安全性更高,且不同于普通安全距离模型的基于驾驶员模型安全报警算法的多级安全预警模式,并进行了仿真分析,结果表明,该算法快速、准确,可靠性高。
关键词:驾驶员模型;防撞;安全预警
Abstract: According to the practical requirements of the vehicle collision avoidance and the timely pre-warning of the radar system, based on evaluation on a variety of alarm algorithms, in conjunction with the kinematic analysis of the automobile brake, this paper introduces a safer pre-warning method, which, different from the traditional distance model based method, is the driver model based multi-level security pre-warning one. Simulated experiments are performed, and results shows that our algorithm is fast, accurate, and reliable.
Key words: Driver model; Anti-collision; Security early warning
汽车防撞雷达的研制需要综合考虑系统的性能、成本和技术可行性。受技术水平和科研条件限制,从技术可实现性上考虑,厘米波汽车防撞预警雷达系统对通行的汽车防撞雷达的功能和工作体制进行了相应简化和修正。系统方案主要针对碰撞预警应用进行设计。使用时,驾驶员设定雷达的预警条件,主要是车辆与前方目标的相对距离和相对速度。雷达对前方目标进行检测,若发现目标,对目标距离、速度和方向进行测量,同时判断目标与车辆是否在同一车道上,若是,对目标的距离、速度与设定条件进行比较,达到预警条件时,雷达向驾驶员进行声光预警。
1 安全距离模型
行车过程中的危险估算与安全决策是学术界的主要研究内容之一,但几乎所有的研究均围绕制动距离建模而进行。本文在分析现有研究成果基础上,对安全距离计算模式及相关原理进行讨论。预警算法的建立,需要考虑到实际交通规则、交通习惯、驾驶员特性等因素。预警算法作为汽车主动防撞系统的关键技术之一,国内外研究人员都在对其进行深入的研究。研究类型主要包括:车头时距报警算法;驾驶员预估模型算法;防止追尾发生的临界距离;驾驶员驾驶状态等模式。
车头时距报警算法,从实际高速公路汽车行驶过程的大量实验统计数据中提取出来的,较有代表性。但没有考虑车辆行驶的所有工况,不完全适用于汽车安全报警。驾驶员预估模型算法通过考察驾驶员的驾驶习惯而来,并通过大量实验数据获得相关的模型特性参数,使计算结果贴近驾驶员主观感受,但是该算法的模型特性参数难以直接测量,给算法的实现带来困难。从制动过程的运动学方程出发,分析防止追尾发生的临界距离的模式,没有考虑驾驶员主观特性,难以用于实际情况。而在运动学分析的基础上加入对驾驶员驾驶状态的判断,虽然提高了计算结果可靠性,但是新参量涉及信号处理等一系列复杂的技术问题,在目前的工程应用和推广中还有很大困难。本文根据汽车主动避撞系统中保障安全和及时预警两方面的实际要求,比较了各种报警算法,在结合汽车制动过程运动学分析的基础上,引入一种基于驾驶员模型的安全报警算法。
2 常用安全报警算法
2.1 车头时间距算法
车头时距算法可表示为:xw =vc · thw+ xoff (1)
式中:vc为本车车速;xw表示安全距离;thw为一定的车头时间距离,一般采用1.0~2.0s比较适宜;xoff是适当停车距离。
在实际公路上,选取合适的车头时距thw值能在一定程度上反映驾驶员的主观判断,但是该算法不适用于对静止障碍物的报警。
2.2 固定距离保持法
以固定的距离C作为门限值,低于该数值就报警。算法可表示为:xw=C, (2)
一般C可根据各个车速下的制动距离而定。
2.3 驾驶员预估模型报警算法
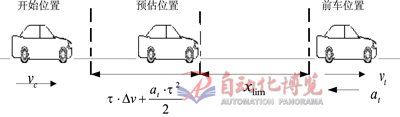
图1 驾驶员判断示意图
驾驶员预估模型报警法是根据驾驶员预估行为确定安全距离的方法。如图1所示,驾驶员先估计现有相对速度和相对车距,接着预测短时间T内的运动变化,若T时间后距离恰好等于的最小安全距离xlim,则当前距离为报警临界距离。公式为:
 (3)
(3)
式中:△v为初始相对速度,at为目标车辆减速度。
与车头时距法相比,驾驶员预估模型算法重视人的主观感受,xlim算式中考虑到了前车静止、减速运动等工况。但是模型中的关键参数,例如T、at的值较难确定,算法的准确度难以得到保证。
3 驾驶员模型安全报警算法
根据上述方法的优缺点,引入一种新的基于驾驶员模型的安全报警算法。首先进行以下假设:
(1)从驾驶员听到报警到制动系统开始作用有固定的延迟时间,忽略该时间内的制动力变化;
(2)前车在时间内将保持当前的运动状态,匀速或匀减速运动;
(3)本车在时间内保持匀速运动,不考虑时内本车的加速;
(4)本车和前车具有相同的制动效能。
和驾驶员预估模型方法比较,报警起始时刻和制动系统起效时刻容易记录,所以该延迟时间可以较准确地直接测得。令xlim由制动过程相对位移xbr和停车距离xoff组成,由此得:
 (4)
(4)
xlim=xbr+xoff
式(4)中:△a为本车相对前车的加速度,在假设条件成立时就等于目标车减速度值at;停车距离xoff可以认为是某一常数;xbr是制动力开始作用后整个制动过程中两车的相对位移,是根据不同运动状态选取的不同形式的关于车速的函数。
3.1 前车静止
设制动相对位移就是当前车速下以主观最大减速度减速到零所通过的距离,即: (5)
(5)
其中,amax为驾驶员主观认为的自车最大制动减速度,其值取决于具体的行驶工况。这样得到前车静止条件下的算法表达式为: (6)
(6)
从形式上看上式和驾驶员预估模型一致,但算式的物理意义完全不一样。
3.2 前车紧急制动
前车开始紧急制动直至停车,后车在时间后也紧急制动。取xbr为时间以后直到两车都停止的这段时间内两车的相对位移。图2给出了满足假设条件(4)的两车的车速-时间函数关系,按照初速度比较结果分为3种情况。
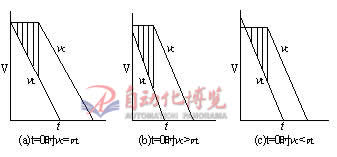
图2 等效制动模型
图中vt表示目标车的速度,阴影部分面积为式(7)中的前两项的和,两车速度曲线包围的多边形的剩余面积就是xbr。计算两曲线包围的多边形面积,可得: (7)
(7)
当两车初速度相同时: (8)
(8)
式(8)和车头时距报警算法的表达式相似,但各参量的物理含义和实际取值不同,更易于测量。进一步分析,抛开假设条件(4),假定前车依旧紧急制动(减速度为amax),而本车能够正常制动(减速度ac),模拟更为谨慎的驾驶风格。如图3所示。计算式为: (9)
(9)
式中的amax和ac都是典型经验值。
图3 非等效制动模型
3.3 前车正常运动
车辆正常行驶中速度基本保持不变或者变化缓慢。车辆正常减速时减速度典型值仅为1.5m/s2左右,后车驾驶员能够及时调节本车的运动,只需要比较小的距离来克服相对速度的变化对两车跟随状态的影响。整个过程中前车速度变化不大, 时间内忽略不计, 时间后后车制动起效,取xbr为以主观最大相对减速度△amax消除相对运动而产生的位移。代入式(4)得: (10)
(10)
3.4 多级安全报警
根据以上分析,针对不同的行驶工况可以采取不同的计算方式。尤其在前车运动情况下,可以用式(7)来计算确保不发生碰撞的安全保障距离,用式(10)结果作为跟车追赶时的最低安全保障距离,用式(9)的结果作为谨慎行车指导,这就为设立多级安全报警创造了条件,为不同驾驶风格的驾驶员提供了各自的选择,也是本系统不同于一般仅针对高速行驶工况预警模型之处。
4 仿真分析
在改进算法中,和△amax可以在实际行驶过程中得到。是在车辆正常行驶中当报警装置给出警报信号,驾驶员随即作出反应,从起始时刻和到开始制动需要的延迟时间。△amax可根据公路上车辆行驶情况得到,前车自由行驶,后车主动跟随。通过前车的速度变化,记录后车速度、距离以及所采取的行动,总结不同车速下的主观安全距离,可以验证经验的主观最大减速度amax。仿真分析可取经验值 =1.25s,amax =7m/s2,相应地取△amax =3m/s2。
4.1 前车静止时算法的比较分析
设F-D表示固定车距法,T-H表示车头时距法,D-M表示驾驶员预估模型法,A-D-M为改进驾驶员模型报警算法,报警距离在这几种算法下的结果对比如图4所示。
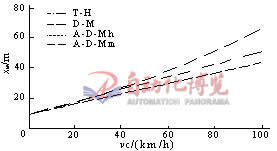
图4 报警距离的结果对比
采用固定车距法的曲线取值是不同的速度区间的经验值,一定程度上可以作为其他算法结果是否准确的评判参考。其余二者差别主要在高速段。低速段属于驾驶员控制灵活区,车头时距模型计算结果稍大,容易发生过多报警而会引起驾驶员反感;高速段驾驶员控制力低,报警距离应该适当放宽,车头时距法己偏离了参考值,故不可取。而改进算法较之驾驶员预估模型算法,曲线形态基本一致,这说明对原参量物理意义重新定义后仍然符合主观标准。
4.2 前车运动时算法的比较分析
考虑前车紧急制动情况。设两车起始速度相同,驾驶员预估模型的算式就等同于车头时距法,若采用改进算法,式(7)得到较高安全保障值(A-D-Mm),式(9)得到更谨慎的行车指导值(A-D-Mh),比较结果如图5所示。车头时距法广泛应用于高速公路的行车指导,实际需要的报警距离应以此为参照而略有降低。式(7)结果满足了这一需要;式(9)结果略大,可用作初步提醒,适合谨慎的驾驶员使用。
考虑前车正常行驶,若两车有相对运动的整个动态追逐过程,加入最低安全保障,即式(10)。假定前车在前方50m,初速度60km/h,做缓慢的匀减速行驶,本车以60km/h的初速度和2m/s2的加速度追赶,结果对比如图6所示。
各报警曲线和实际距离曲线S相交点为报警时刻。图中改进算法的谨慎行车指导值和高安全保障值最先报警,预防前车紧急制动。最低安全保障值是防止碰撞要求的最低安全距离,随时间推移,相对速度过大时,驾驶员预估模型算法和车头时距法的结果将小于该值而失效。因此,不考虑前车紧急制动,在两车相对速度较大时,采用改进算法才能够提供最低安全保障,而且该算法也可以适用于汽车低速行驶状态。
图5 两车运动的安全距离计算
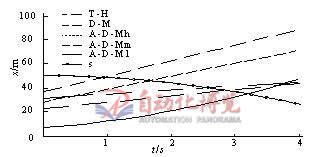
图6 追赶过程各算法比较
5 小结
研制开发汽车防撞系统对于减少交通安全隐患、提高运输能力,并进一步开发汽车电子领域,具有重要现实意义和广阔前景,有利于我国汽车智能化紧跟国际先进的发展水平,基于驾驶员模型安全报警算法在汽车主动防撞预警系统中的应用,对于提高汽车行驶安全系数具有重要的现实意义。参考文献:
[1] Ayres T J,Li L,Sohleuning D,et al.Preferred time-headway of highway driver[A].Intelligent Transportation Systems[C].Oakland, CA:IEEE Press, 2001. 826~829.
[2] 沙永忠,田方正等. 数字信号处理的新方法[J],测控技术,2006. 25(4): 8~10.
[3]H.Rohling,M.Meinecke,M.Klotz,R.Mende.Expericences With an Experimental Car Controlled by a 77GHz Radar Sensor.International Conference Radar-98:345~354.
[4] 周伟,曾利华,陆坤. 超声波电子倒车雷达的研制[J]. 计算机测量与控制. 2004.12(4): 349~351.
[5] 龚微寒. 汽车现代设计制造[M]. 北京: 人民交通出版社,1995.
[6] 郑安文. 高速公路行车间距分析与防追尾装置开发[J]. 武汉理工大学学报,2002. 24(9):62~65.
——转自《自动化博览》
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号