



.jpg)



当前位置:首页»案例
- 智能电网的神经系统——嵌入式通信控制器
-
企业: 日期: 2010-11-10 领域: 运动控制 点击数: 1389 作者简介:吴道虎,男,工学博士,毕业于武汉华中科技大学,现任北京立华莱康平台科技有限公司研发总监,主要从事嵌入式产品/工业交换机产品开发与技术管理工作。
摘要:智能电网作为未来国家工业发展的重点,其基础是通信系统,本文结合智能电网对其通信系统的要求,在分析了智能电网通信系统的技术特征的背景下,提出了满足智能电网通信需求的工业嵌入式通信控制器的设计方案与实现技术。
关键词:智能电网;工业嵌入式通信控制器;IPv6;IEEE1588;设计与实现
1 智能电网以及对工业嵌入式系统的要求
1.1 智能电网通信技术
建立高速、双向、实时、集成的通信系统是实现智能电网的基础[1],以满足智能电网的数据获取、保护和控制的所需的通信要求,实现电网和通信网络的完美统一,使智能电网成为一个动态的、实时信息和电力交换互动的大型基础设施,极大提高电网的供电可靠性和资产的利用率,抵御电网受到的攻击,从而提高电网价值。适用于智能电网的通信技术需具备以下特征:
(1)具备双向性、实时性、可靠性特征,出于安全性考虑,应是与公网隔离的电力通信专网;
(2)具备技术先进性,能够承载智能电网现有业务和未来扩展业务;
(3)具备自主知识产权,具有面向电力智能电网业务的定制开发和业务升级能力。
1.2 智能电网对信息处理平台要求
智能电网是将现代先进的传感测量技术、通信技术、信息技术、计算机技术和控制技术与物理电网高度集成而形成的新型电网。从智能电网的架构,如图1所示来看,“发电–输电–配电–需求侧”4 级产业链业务是互动的,互动的基础是坚实可靠的通信网路,因此建立“高速、双向、实时、集成”的通信系统是实现智能电网的基础,在现场级中承担着智能电网的电能信息采集、处理与分析、安全管理、通信、决策运算等任务的工业嵌入式平台在智能电网架构中的作用越来越重,对其可靠性、稳定性、安全性等提出了更高的要求。大致分析如下:
(1)依靠数字通信与其它IED进行协调配合:在智能电网中,其通信协议IEC-61850的实现,传统导线将被光纤取代,传统的调试维护工作将转变为检查网络通信是否正常,数字化通信将成为IED之间进行协调配合的主要形式;
(2)具有以太网的通信接口:具备IEC61850协议的产品实现中的物理层和链路层接口都是以太网接口,且逐步以光纤为媒体的以太网接口为主;
(3)设备本身必须是绿色环保,以符合智能电网对接入设备的要求,因此,必须是更低功耗、具有RoHS特征、自我诊断、功能失效恢复与报警智能特性等;
(4)工业以太网通信网路具备IPV6特性;
(5)具备IEC-61588(2009),也即IEEE-1588特性的精确对时通信;
(6)设备具备高可靠性、安全性,尤其是EMC符合电力系统要求,如满足IEC-61850-3是其基本要求。
总之,应用于智能电网中的新型工业嵌入式控制器,必须具备测量、控制、事件和故障记录等多项功能,从而降低设备空间、简化接线、降低投运与维护成本;另外,更为重要的是必须具有较强的通信能力,且满足IPV6特性,使电网的信息集成成为可能。因此,满足智能电网的新型工业嵌入式控制器的关键特征是具备IPV6以及IEC-61588(PTP)两大特性。本文主要从这个方面的实现进行阐述。
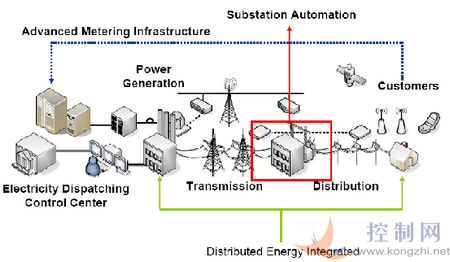
图1 智能电网架构
2 满足智能电网的嵌入式系统的设计
本文所涉及的核心技术应该是如何实现IPV6以及IEC-61588精确对时两大关键技术,以此满足智能电网的通信要求。
2.1 CPU系统
本部分不是本文的重点,嵌入式系统一般会采用具有最低功耗的RISC技术,如ARM、MIPS、PowerPC内核的CPU,这一类主要用于现场级的智能电子设备IED中,而需要做大量信息处理、操作决策的平台还是以ULV X86平台为主,尤其是Intel公司近期推出的嵌入式CPU,如Atom N270、N280、Pinewell N450和双核D510系列。
2.2 通信网路
2.2.1 IPv6的实现
随着近年来Internet应用的急剧增加,IPv4已经露出很多弊端,智能电网会以IPV6为主。在本系统设备开发过程中,为满足新旧设备无缝连接,需要实现IPv4与IPv6系统兼容,主要考虑如下3个问题:一是充分利用现有的IPv4资源,节约成本并保护原使用者的利益;二是在实现网络设备互联互通的同时实现信息高效无缝传递;最后,在IPv4向IPv6过渡时期,采用如下的组网原则:
(1)在能直接建立IPv6链路的情况下使用纯IPv6路由;
(2)在不能使用IPv6链路的情况下,IPv6节点之间使用隧道技术;
(3)双协议栈的IPv6/IPv4节点和纯IPv6节点或者纯IPv4的节点通信不需要采用协议转换,而直接“自动”选择相应的协议进行通信;
(4)对于纯IPv6节点和纯IPv4节点之间的互通,则应该使用协议转换(NAT-PT)或者应用层网关(ALG)技术,且保证在不修改原有应用的情况。
实现IPv4、IPv6系统兼容最关键的一点就是能够正确拦截并修改与移动IPv6相关的IP包,而对于其他正常的IP包不作任何改动。Linux Netfilter[2]框架正好提供了这种能力。利用Netfilter框架,对于从本机发出去的IPv6包,可以用NF_LOCAL_OUT hook来拦截它们,并判断是否属于移动IPv6协议的包。如果不是,则不作任何改动,将这些包发送出去;如果是IPv6协议的包,则将它们递交到相应的移动IPv6处理模块。该模块按照IPv6协议规范,或者改动包的内容将其重新放入内核协议栈后发送出去,或者是从该包中获取需要的信息后将其丢弃。同样,对于从网络中接收到的IPv6包,操作基本相同,只不过包的流动方向相反。即使用Netfilter框架的NF_PRE_ROUTING hook拦截收到的IPv6包,判断并递交到移动IPv6处理模块进行处理,然后重新放入协议栈,交给相应的上层应用软件系统解决了在IPv6环境中如何收发IPv6_in_IPv6 Tunnel包。图2表示了IPv4与IPv6协议转换模型。
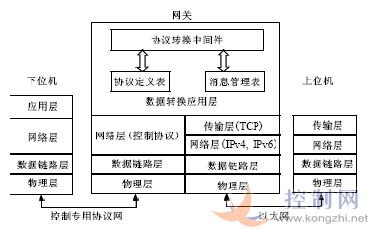
图2 IPv4与IPv6协议转换模型
2.2.2 时延的解决
智能电网对信息通信通道的时延要求是:变电站内部小于1 ms,其它小于500 ms;同步时间偏差小于1 ms。据IBM对带宽需求的预测,每个先进的变电站需0.2~1.0 Mbit/s 带宽,连续抄表每百万先进的电表需1.85~2.0 Mbit/s 带宽,每万个智能传感器需0.5~4.75 Gbit/s 带宽。
工业以太网在工业控制中应用的最大障碍是其时延性以及数据传输过程中的时间不确定性,但随着快速以太网与交换式以太网技术的发展,通信速率从10M、100M增大到如今的千兆、甚至10G,完全可以胜任控制响应时间大于5ms的系统,但对于智能电网系统的控制传输抖动小于1ms的系统,则仍然显得力不从心。解决工业以太网实时性除了进一步提升其本身的传输速率外,根本的解决工业以太网数据传输的机制,以期进一步提高数据传输的时间确定性。目前各大公司和标准组织纷纷提出各种提升工业以太网实时性的技术解决方案,其中包含我国EPA实时以太网标准在内的六个主要的实时工业以太网标准:EPA、EtherCAT、Ethernet Power Link、PROFINET、MODBUS-IDA和Ethernet/IP。
工业以太网可以分为两大类:用于过程控制领域的工业以太网(例如HSE)以及用于离散控制领域的工业以太网(例如EPL)。两者的共同之处在于网络响应时间具有统一的模型,网络中的延迟都是其中重要组成部分。整个工业以太网系统的实时性能是由网络响应时间反映的,影响网络响应时间的因素主要来自三个部分:本地系统(即源节点的处理)、工业以太网网络(即传输部分)、目的节点系统(即目的节点的处理)。某种报文的实时性得到满足是指其报文响应时间小于规定的时限,某个节点的实时性合乎要求是指该节点发出的所有报文在指定的时限内都能获得响应。整个控制网络的实时性符合要求是指分布在网络上每一个节点的每一种报文的实时性均得到保证。为满足整个网络的实时性,对报文传输给予下列三个时间约束条件,则可以极大程度地降低网络的延迟:
(1)每个节点获得通信权的时间有上限值限制。若超过此值,无论本次通信任务是否完成,均应立即释放通信权。这一时间约束可防止某一节点长时间占用总线而导致其它各节点实时性恶化;
(2)应当保证在某一固定的时间周期内,网络上的每一个节点都有机会取得通信权,以防个别节点因长时间得不到通信权而使其实时性太差甚至丧失实时性。只要有一个节点出现这种情况,整个网络的实时性就得不到保证。这一固定时间周期的长短是控制网络实时性好坏的一个衡量标准;
(3)对于紧急任务,当其实时性要求临时变得很高时,应当给以优先服务。对于实时性要求比较高的节点,也应当使它取得通信权的机会比其它节点多一些。因此采用静态(固定)的方式赋予某些节点较高的优先权,采用动态(临时)的方式赋予某些通信任务以比较高的优先权,则将使紧急任务及重要节点的实时性得到满足。
2.3 IEC-61588(2009)实现
为满足智能电网的实时与互动,尤其是电能采集系统,其前端的各种传感器连接到数据采集板,板上安装的精确时钟通过IEEE1588协议的以太网与系统主时钟同步,使传感器的同步时间发生在1μs内,每秒钟内要执行200次测量,测量间隔5ms,传感器的轮换时间是1μs。控制系统内的多种测量仪器在时间对准后,按本地时钟捕捉数据和分析数据,清除了触发产生的延迟。这种利用IEEE1588协议的以太网数据采集系统,节省大量分别连接每个传感器的线缆,达到精确定时同步,便于远控测量,成本降低。
当前工业自动化使用IRIGB格式时间码,每天时间准确度小于1μs。而IEEE1588更加具有潜力,可将控制系统的每天时间准确度推进到100ns。原因IEEE1588协议可直接将每天时间信息从主控时钟发送到客户时钟,更具有优势。从智能电网发展趋势来看,采用IEEE1588协议的以太网将会更适合智能电网。
更为重要的是采用IEEE1588协议的以太网,解决了通用以太网延迟时间长和同步能力差的瓶颈,在电能监测应用中将发挥更大作用。确定时间偏移的典型方法是使用同步消息来确定对主机的偏差。使用平均或滤波的方式来平滑连接,并避免每次测量的过量校正。对于时间校正来说,可利用两个不同的机制来检测和校正时间偏差。
第一个机制的基本想法是寻找最小延时。基本算法是在最近的延时中检测最小的主机到从机的延时。为防止过量校正,也对时间校正进行了限制。这个方法基于它拥有的最好信息而在每个周期都进行校正。如果没有收到真实的最小延时消息报文,这将导致不适当的校正。
第二个时间校正机制是尝试只使用延时来进行校正,前提是这些延时已经确定为真实最小延时包,它有助于避免对时间值的无效校正。这个机制的基本想法是使用同步和延时请求来进行时间校正。对于同步消息,如果主机到从机延时小于最小平均路径延时,测量结果就显示至少有一个主机到从机延时减去最小平均路径延时的时间偏差。
两个方法都是通过调节一段时间内的精准时间协议的时钟速率来进行时间校正。为了避免速率的大波动,每一个校正都限制幅值。这将有助于降低由于时间偏移的快速校正而引起的时间间隔误差。在第二个机理中通过保持时间误差值进行处理。当因接收到的同步或延时请求引起的新误差被计算出来时,如果这个新误差代表了一个更大的偏差,时间误差就更新为新值。否则,时间误差保持不变。基于时间误差,只能进行有限的校正并从时间误差中去除。因此,在完成校正之前,偏移测量可能进行多次校正。图3为采用美国国半公司的DP83640芯片的解决方法。
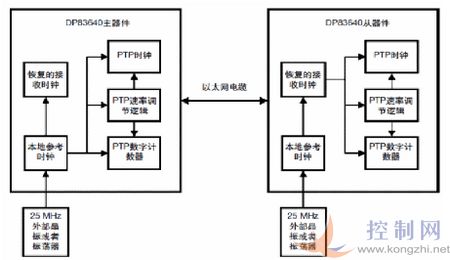
图3 在点对点网络拓扑中同步以太网模式使能的DP83640的工作框图
3 结语
只有满足低功耗、且具有IEC-61588精确网络通信报文对时功能,同时具备IPv6特性,能实现与IPv4平稳过度和无缝连接的嵌入式通信控制器平台,才能真正适合未来智能电网功能强大的通信系统的要求。北京立华莱康平台科技有限公司是一家专业从事网络安全与通信设计的专业厂家,具备从RISC到嵌入式X86网络安全与通信平台设计、加工能力。为适应未来智能电网的发展需求,目前已经开发了能满足智能电网通信要求的通信应用平台,如表1所示。
表1 能满足智能电网的工业嵌入式通信应用平台

致谢:本文撰写过程中,参考了许多专家已有的科研成果,在此深表谢意。鉴于版面限制,不一一列举。
参考文献:
[1] 常康,薛峰,杨卫东. 中国智能电网基本特征及其技术进展评述[J]. 电力系统自动化, 2009, (17).
[2] 王浩. IPv4与IPv6相互转换技术研究[J]. 计算机与数字工程, 2010, (01) :114-117.
[3] 陈永标. IEEE 1588时间精确同步协议(PTP)在电力系统应用的可行性研究[D]. 上海交通大学,2009.
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号