



.jpg)



当前位置:首页»案例
- 仿人机器人及其步态控制
-
企业: 控制网 日期: 2010-11-16 领域: 点击数: 3259 
作者简介:邢登鹏(1980-),男,山东省德州市人。天津大学机械电子系本科,天津大学机械制造及其自动化系硕士,上海交通大学自动化系博士。主要研究方向为仿人机器人和人工智能。
摘要: 仿人机器人是最能代表人类用工程方法进行自我克隆的能力的智慧结晶。它可以具有类人的外貌特征和运动功能,以及视觉、听觉、触觉、接近觉、味觉等智能感知能力,可在未知环境中独立行走,与人进行一定程度的交流,其技术研究是当今机器人领域的前沿和热点。本文就近年来机器人平台的发展和步态控制的研究近况进行综述,分别概括各方向的发展动态和目前仍然存在的问题。
关键词: 仿人机器人;机器人平台;步态控制
1 绪论
机器人产业的飞速发展,已经在某些领域解放了人类繁重、危险的劳动,随着该应用领域的拓展,智能机器人的研究与开发成为机器人领域内非常活跃的热点之一,其中尤以仿人机器人为代表。仿人机器人是与人类的形态相似的一种智能体,可以在人类生活和工作环境中,代替人类完成各种作业。未来它可以在医疗、生物技术、军事等多个领域得到广泛应用,也会使我们更从容面对老龄化社会。在人性化、智能化、灵活性等方面,仿人机器人具有其他类型机器人无法比拟的优点,是未来机器人研究领域,特别是与人为伍的家用化机器人的主流发展方向。
仿人机器人是一个多学科交叉的研究方向,集成了机械、材料、电子、传感、控制等多个领域的技术应用,是一个国家高科技实力和发展水平的重要标志。目前,美国、日本、法国、荷兰等国家都在进行多样化的仿人机器人研究工作。一般仿人机器人应具备的功能:1. 运动能力:能在人类的生活和工作环境中移动;2. 操作能力:能对外界物体进行操作;3. 感知能力:了解周围环境的信息的能力;4. 学习能力:动态环境中不断更新知识库;5. 人机交互能力:与人类进行沟通和交流[1]。
本文着眼于仿人机器人的发展过程,阐述机器人平台的发展和多样化,概括分析行走和跑步的控制方法研究和应用,并总结这些领域内仍然存在的问题。
2 仿人机器人平台
1968年早稻田大学加藤一郎教授首先展开仿人机器人的研究,之后陆续推出了WAP、WL、WABIAN等系列机型,WABIAN-2R是该实验室最新推出的样机,如图1所示,该机器人高1.5米,重64.5公斤,有41个自由度;配有类似足弓的装置,用以实现类似人类的heel-contact and toe-off运动[2];能实现在不平整地面上的稳定运动,并在户外运动实验中进行了验证。
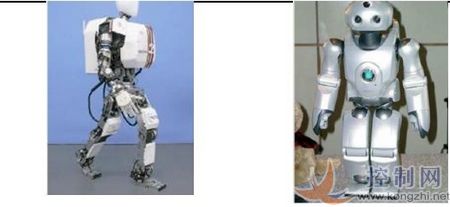
图1 WABIAN-2R机器人 图2 ASIMO机器人
1986年日本的本田公司响应日本政府解决老龄化社会问题的号召,制定了研制仿人机器人的详细计划。经过多年深入的研究,已经推出了多款具有各种应用能力的仿人机器人,在国际仿人机器人研究领域产生了重大影响。在推出的众多机型中最先进的是ASIMO(Advanced Step in Innovation Mobility)机器人[3],如图2所示,可以实现在复杂状态下的稳定行走,最高步行速度可以达到2.7公里/小时,采用了先进的I-WALK(Intelligent Real time Flexible Walking)柔性行走方式,增加了预测移动控制技术,使机器人实现在改变速度和方向的时候仍能流畅地连续步行。
图3是法国RABBIT仿人机器人[4],高1.4米,重36公斤,平面运动时有5个自由度,三维行走有7个自由度;它的双足由轮子代替,采用极限环的控制方法能够实现行走和跑步;运动方式可以根据障碍物和地形做出相应调整,还可以在有干扰的情况下恢复平衡。
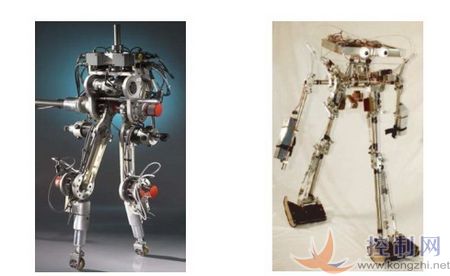
图3 RABBIT机器人 图4 Cornell被动式机器人
以上各机器人均是主动行走类型。与之平行的另一种类型的仿人机器人是被动行走机器人,其主要特点是没有驱动源,或者使用很少的驱动器,依靠重力和双腿交替向前的频率从斜坡往下走。图4是美国Cornell大学的被动行走机构,该机构有两条0.8米长的腿,配有膝盖关节,两条腿通过腰部连接到一起。机器人的脚底是一个凹凸面,有两个手臂和一个躯干,右臂与左腿通过机械结构刚性连接到一起,左臂与右腿也用相同的方式进行连接,用以减小自转影响。为了减少运动中的能量消耗,使用弹簧以存储行进中的能量。其他类型的被动式机器人也有广泛的研究和开发,例如Delft气压驱动机构和MIT双足机器人等[5]。
3 仿人机器人运动控制研究
仿人机器人相比较其它机器人的一个明显的特征是拥有像人一样的两条腿,而由于仿人机器人系统的复杂性和不稳定性,动态步行以及跑步运动的稳定控制一直是该领域的研究重点。步态规划主要有以下几种方法:
3.1 基于稳定判据的方法
仿人机器人步态规划最常用的方法是采用Vukobratovic提出的ZMP(Zero-moment Point)判据[6]。在步行过程中,如果机器人的ZMP点始终位于包括所有地面接触点的最小凸多边形内,则机器人系统是动态平衡的,机器人的步态规划是可行的。基于ZMP 判据设计动态步行策略等价于生成满足这一约束条件的步行运动轨迹问题。基于ZMP的步态规划有以下两种方法。
(1) 从理想ZMP轨迹确定身体各关节的运动[7]:先设计理想ZMP轨迹,然后确定可实现理想ZMP轨迹的各关节运动。该方法求解不唯一,且不是所有的理想ZMP都能实现。
(2) 从双足和躯干的运动轨迹确定ZMP轨迹[8]:先设计双足和躯干的运动轨迹,然后确定ZMP轨迹,之后在可变参数的有效范围内找出稳定裕度最大的轨迹作为规划结果。该方法求解唯一但计算量大。
其它常用的步态稳定判断准则还有CoP(Center of Pressure)[9],FRI(Foot-Rotation Indicator)[10]和GZMP(General Zero Moment Point)[11]等。对于周期性运动,庞加莱回归影射(Poincare Return Maps)[4]是一个强有力的分析工具,而仿人机器人在没有干扰下的行走和跑步都是周期性的,所以庞加莱回归影射方法用于被动行走装置的周期性步态研究,分析有脚踝关节驱动的被动双足的学习算法以及用于一个平面驱动双足机器人的自动控制系统设计。但是庞加莱回归影射的缺点也很明显:只能应用到有周期运动的系统上,而对于非周期运动则无能为力。
3.2基于人类步行运动数据的方法
仿人机器人的步态研究是希望它能有像人类一样的运动能力,因此可以记录并修正人类的步行运动数据HMCD(Human Motion Capture Data)用于仿人机器人步态控制中:通过各类传感器提取出人类运动,并根据仿人机器人的机构特性对数据进行修正,以把合理数据映射到仿人机器人步态控制中[12]。Dasgupta[13]基于HMCD中脚的运动数据设计理想ZMP轨迹,对所选关节运动进行修正,使HMCD与理想ZMP匹配。Hodgins[14]采集多个演员实现某个特定动作的数据,针对仿人机器人的特点通过算法对数据进行处理,得出可用的控制轨迹,并在ATR机器人上进行验证。
3.3其它行走控制方法
由于仿人机器人的高阶、非线性、强耦合等特性,经常会使用到简化的模型,其中常用的是倒立摆模型[15]。该方法假设腿部很轻,将整个身体的质量集中于一点,以支撑脚为支点,建立单足支撑的动力学简化模型。由于其简单易用,且易于在线控制,从提出以来得到广泛应用。
虚拟模型控制(Virtual Model Control)[16]检测力与位置之间的关系,而非对其分别处理;其优点在于柔性和鲁棒控制,以及运算简单。这种方法使用“虚拟的”贴附于机构的弹簧阻尼点,根据线性反馈的位置和速度误差生成简单的力控制,已被用于控制平面双足机构和四脚运动装置。
3.4跑步运动规划
为了能够使仿人机器人实现跑步功能,需要考虑:(1)能够处理在空中停留和地面接触两种状态的运动模式,及模式切换;(2) 能够吸收飞跃和着地时的地面冲击力,以及修正姿势误差;(3)防止和消除旋转、打滑等外界干扰对系统稳定性的影响。
在上世纪八十年代初期,Railbert[17]在研究单腿跳跃机器人的基础上提出了机器人跑步的概念,并将控制行为分成跳跃高度、脚踝着地角度和姿态控制三部分,强调对称性在设计稳定跑步运动中的作用。Chevallereau[18]针对一类球铰副连接无脚平面步行机器人,利用混合零动力学提出了渐进稳定跑步控制方法。Kajita[19]等人将仿人机器人跑步分解为着地和飞翔阶段,利用倒立摆对跑步进行控制,将同一机器人实现跑步和行走各个关节需要的扭矩和功率进行了对比。文献[20]介绍了一种生成机器人运动的解析动量控制RMC(Resolved Momentum Control)的方法,通过对双腿的线速度和角速度的参考值、线性总动量和角动量的参考值的计算,得到腿部运动过程中各个关节的速度。实验结果证明该方法可以稳定的控制HRP-2LR机器人跑步运动,速度达到0.16米/秒[21]。
4 结论
仿人机器人已经在运动控制方面取得了很大的进展,可以实现稳定的行走和跑步运动。但是目前的运动研究仍然停留在实验室阶段,如何让仿人机器人走进人们的日常生活中,仍然有许多问题需要解决;同时,虽然已经有样机可以实现跑步运动,但是如何让这些机器人实现更快速的稳定可靠的跑步运动仍然是需要进一步研究的工作。
参考文献
[1] C. G. Atkeson, J. G. Hale, F. Pollick, et al. “Using humanoid robots to study human behavior”, IEEE Intelligent Systems and their Applications, 2000, 15(4), pp. 46–56.
[2] Y. Ogura, K. Shimomura, H. Kondo, et al. “Human-like walking with knee stretched, heel-contact and toe-off by a humanoid robot”, Proceedings of IEEE International Conference on Intelligent Robots and Systems, 2006, pp. 3976-3981.
[3] J. Chestnutt, M. Lau, and G. Cheung. “Footstep planning for the Honda ASIMO humanoid”, Proceedings of IEEE International Conference on Robotics and Automation, 2005, pp. 631-636.
[4] J. W. Grizzle, C. Chevallereau, and C. Shih. “HZD-based control of a five-link underactuated 3D bipedal robot”, Proceedings of IEEE International Conference on Decision and Control, 2008, pp. 5206-5213.
[5] S. Collins, M. Wisse, and A.Ruina. “A three-dimensional passive-dynamic walking robot with two legs and knees”, International Journal of Robotics Research, 2001, 20(7), pp. 607-615.
[6] M. Vukobratovic and D. Juricic. “Contribution to the synthesis of bipedal gait”, IEEE Transactions on Bio-Medical Engineering, 1969, 16(1), pp. 1-6.
[7] M. Gienger, K. Loffler, and F. Pfeiffer. “Towards the design of a biped jogging robot”, Proceedings of IEEE International Conference on Robotics and Automation, 2001, pp. 4140-4145.
[8] Q. Huang, K. Yokoi, S. Kajita, et al. “Planning walking patterns for a biped robot”, IEEE Transactions on Robotics and Automation, 2001, 17(3), pp. 280-289.
[9] P. Sardain and G. Bessonnet. “Gait analysis of a human walker wearing robot feet as shoes”, Proceedings of IEEE International Conference on Robotics and Automation, 2001, pp. 2285-2292.
[10] A. Goswami. “Postural stability of biped robots and the foot-rotation indicator point”, International Journal of Robotics Research, 1999, 18(6), pp. 523-533.
[11] K. Harada and S. Kajita. “Pushing manipulation by humanoid considering two-kinds of ZMPs”, Proceedings of IEEE International Conference on Robotics and Automation, 2003, pp. 1627-1632.
[12] S. Calinon, F. Guenter, and A. Billard. “Goal-directed imitation in a humanoid robot”. Proceedings of IEEE International Conference on Robotics and Automation, 2005, pp. 300-305.
[13] A. Dasgupta and Y. Nakamura. “Making feasible walking motion of humanoid robots from human motion capture data”, Proceedings of IEEE International Conference on Robotics and Automation, 1999, pp.1044-1049.
[14] K.Tamane, J. K. Hodgins, and H. B. Brown. “Applied optimal control for dynamically stable legged locomotion”, Proceedings of IEEE International Conference on Robotics and Automation, 2003, pp. 300–305.
[15] O. Ibidapo-Obe, A. B. Alonge, and A. B. Badiru. “On active controls for a biped mechanism”, Applied Mathematics and Computation, 1995, 69, pp. 159–183.
[16] J. Pratt, C. Chew, A. Torres, et al. “Virtual model control: an intuitive approach for bipedal locomotion”, International Journal of Robotics Research, 2001, 20(2), pp. 129–143.
[17] M. Raibert. “Legged Robots That Balance”, MIT Press, Cambridge, MA. 1986.
[18] C. Chevalereau, E. R. Westervelt, and J. W. Grizzle. “Asymptotically stable running for a five-link, four-actuator, planar bipedal robot”, International Journal of Robotics Research, 2005, 24(6), pp. 431-464.
[19] S. Kajita, T. Nagasaki, K. Yokoi, et al. “Running pattern generation for a humanoid robot”, Proceedings of IEEE International Conference on Robotics and Automation, 2002, pp. 2755-2761.
[20] S. Kajita, F. Kanehiro, K. Kaneko, et al. “Resolved momentum control: humanoid motion planning based on the linear and angular momentum”, Proceedings of IEEE international conference on Intelligent Robots and Systems, 2003. pp. 1644-1650.
[21] S. Kajita, T. Nagasaki, K. Kaneko, et al. “ZMP-based biped running control”, IEEE Robotics and Automation Magazine, 2007, 14(2), pp.63-72.
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号