



.jpg)



当前位置:首页»案例
- 特殊电动机的变频调速
-
企业: 日期: 2011-01-21 领域: 运动控制 点击数: 2803 变频调速交流异步电动机以其结构简单、价格便宜、适应各种工业条件等优点,被广泛应用于工业生产各个领域。变频器的出现,打破了异步电机无法进行无级调速的局面,改善了其使用效果。随着电力电子技术的不断发展,变频调速技术越来越成熟,过去困扰人们的变频调速的价格问题和技术难题已迎刃而解,变频调速技术的应用越来越广阔,广泛应用于工业设备三相异步电动机的无级调速,并实现节能降耗。下面主要就特殊电动机的变频调速问题进行分析,供大家参考。
1 电磁制动电动机的变频调速
电磁制动电动机常规采用磨擦片来进行制动。在高速状态下停机时,由磨擦片来强行制动,磨擦片容易磨损且故障率高。因为在高速情况下,制动器不论是从抱紧到松开,或由松开到抱紧的过程中,磨擦片之间都会有一个‘打滑’的过程,导致磨擦片容易磨损。下面就电磁制动电动机的变频调速的实现进行讨论。
大多数电磁制动电动机里,电磁制动器的电路是已经接好的,如图1(a)所示。电磁铁的绕组MB是一个大电感,当电源电压为正半周时,电源通过二极管VD1向线圈MB提供电流,当电源电压为负半周时,电源不再提供电流,而是由线圈的自感电动势使电流通过续流二极管VD2继续流动。正常运行时,绕组MB得电,电磁制动器处于松开状态。制动时,交流接触器KM1失电,绕组MB的自感电动势通过续流二极管VD2进行放电,通过短暂的续流后MB完全失电,电磁制动由于弹簧力的作用,抱紧电机停机。压敏电阻RP1,是防止在续流二极管电路一旦发生接触不良等故障时,进行线圈保护。
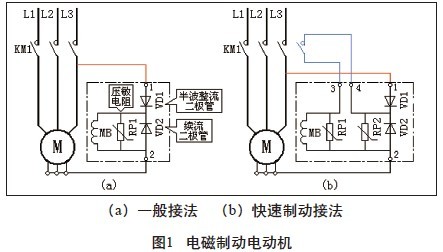
由于通过续流二极管VD2进行续流,具有短暂的续流时间,仅适应于大多数要求并不很高的场合。但对于一些要求准确定位的场合,就希望能够消除这一段续流时间。具体方法如图1(b)所示,正常运行时,绕组MB得电,电磁制动器处于松开状态。制动时,交流接触器KM1失电,绕组MB完全失电,续流电路从3-4点处断开。由于交流接触器KM1失电时间不同,绕组MB的自感电动势也可能不同,自感电动势比较小、低于压敏电阻的阀值时,压敏电阻处于断开状态,绕组MB相当于断开状态,电磁制动装置由于弹簧力的作用,抱紧电机停机;而当自感电动势比较大、超过于压敏电阻的阀值时,压敏电阻连通,与绕组MB形成放电回路,但由于压敏电阻的阻值很大,绕组MB的电流很小,绕组MB的电磁力远小于弹簧力,此时电磁制动装置仍由于弹簧力的作用,抱紧电机停机。但同时需增加一个压敏电阻RP2,以减轻续流时压敏电阻RP1的负担。
采用变频调速后,可以利用变频调速的直流制动功能,使制动器的得电松开和失电抱紧的过程都在直流制动的状态下进行。制动器在抱紧过程中,电动机已经停住,也就不存在磨擦片的磨损。具体方法如图2所示。
首先要注意的是,制动器在出厂时和电动机共电源的联接线不能再用,必须通过单独的接触器KM2与电源相接,其变频接线图如图2(a)所示。变频器的输入、输出端子的功能预置如下:X1端子预置为正转;X2端子预置为反转。变频器的正、反转运行端子X1(KF)、X2(KR)要和制动器的接触器KM2相配合,故正、反转控制由继电器KF和KR来执行。输出端子Y1预置为频率检测,检测的水平可预置得低一点,例如预置为6Hz或更低,用于在停机过程中控制KM2的失电。
当正转启动时,继电器KF得电,令接触器KM2也得电,制动器开始放松;变频器在得到启动指令后,首先执行启动前的直流制动。因制动器的松开时间一般在0.6s以内,故启动前直流制动的时间可预置为1s。这样,制动器的松开过程是在电动机尚未旋转的过程中进行的,就不存在磨擦片的磨损问题了。当变频器的输出频率上升到6Hz以上时,继电器KA得电,KA的动合触点将使KM2保持通电。
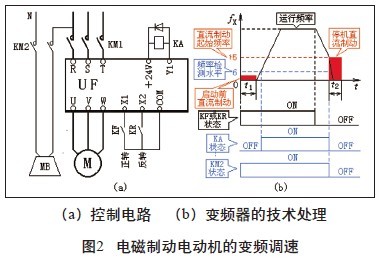
停机时,KF断开,变频器的输出频率按预置的减速时间下降,当下降到直流制动的起始频率(图中设为15Hz)时,开始直流制动,变频器的输出频率降为0Hz,继电器KA失电,使接触器KM2也失电,制动器开始抱紧。因为电动机已提前直流制动了,制动器在抱紧过程中,电动机已经停住,也就不存在磨擦片的磨损了。
2 齿轮电动机的变频调速
对于采用齿轮调速的齿轮电动机,在利用变频调速改造成无级调速时,要注意以下问题:
(1)关于上、下限频率
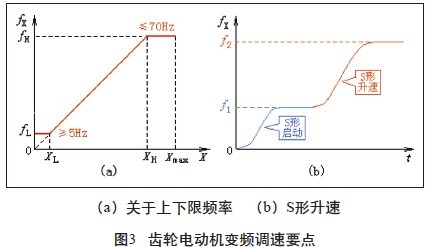
齿轮电动机在低速运行时,润滑油的润滑效果变差。因此,下限频率要受到限制。一般说来,如果使用的是润滑油,则下限频率不宜低于5Hz。如果使用的是润滑脂,则可以在更低频率下运行。
齿轮电动机在高速运行时,会增加齿轮间的磨损,故上限频率也不宜太高,一般以不超过70Hz为宜,如图3(a)所示。
(2)关于加速方式
由于齿轮传动属于刚性联接,在加速过程中容易发生振动,如用于运输机械,则在加速过程中容易使装载物散落,因此,启动时应采用S形加速方式。有的变频器从低频运行(f1)升速到高频运行(f2)时,也可以采用S形加速方式,如图3(b)所示。
(3)关于低频脉动
由于采用SPWM调制方式,所以在低频运行时,电动机的输出转矩会有轻微的脉动,增大齿轮的噪音。因此,对于需要在较低频运行的齿轮电动机,如果齿轮的噪音较大,可在变频器与电动机之间串入电感器件,如将输出线在高频磁心上绕1、2圈等。
(4)关于减缓齿轮的撞击
齿轮在停机时,因为主动轮先停,故啮合点在图4(a)中的B点。启动时,主动轮将撞击从动轮的A点。
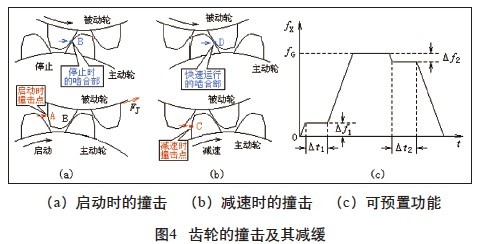
在较高频率运行时,减速过程中,啮合点在图4(b)中的D点。减速时,从动轮由于惯性,将撞击主动轮的C点。
为了减缓这种撞击,在启动时,应在很低频率Δf1时停留短时间Δt1,使主动轮缓慢地靠上A点。而在减速时,先让工作频率下降一个微小的增量Δf2,并停留短时间Δt2,使从动轮缓慢地靠上C点,从而减缓了齿轮间的撞击,如图4(c)所示。
3 潜水泵的变频调速
潜水泵起动时的电流冲击及调节压力/流量的方式与鼓风机相似。潜水泵起动时的急扭和突然停机时的水锤现象往往容易造成管道松动或破裂,严重的可能造成电机的损坏,且电机起动/停止时需开启/关闭阀门来减小水锤的影响,如此操作一方面工作强度大,且难以满足工艺的需要。在潜水泵安装变频调速器以后,可以根据工艺的需要,使电机软启/软停,从而使急扭及水锤现象得到解决。而且在流量不大的情况下,可以降低泵的转速,一方面可以避免水泵长期工作在满负荷状态,造成电机过早的老化,而且变频的软启动大大地减小水泵启动时对机械的冲击。并且具有明显的节电效果。潜水泵是用来潜入水池底部向上抽水的,在实施变频调速时,只需注意以下两个问题。
3.1 变频器的选择
3.1.1 容量选择
水池的底部常常会有一些杂物堵住潜水泵底部防护网的网孔,从而加重水泵的负担,使电动机短时间过载。所以,变频器的容量应该加大一挡,如5.5kW的潜水泵采用7.5kW的变频器。
3.1.2 型号选择
潜水泵对机械特性的硬度并无要求,不需要矢量控制,故只需选择通用变频器即可。
3.2 变频器的输出线

由于潜水泵的电动机是和水泵做成一体,和导线一起潜入水中的,导线的长度较长,导线间的分布电容较大。所以,在变频器的输出端,最好接入输出电抗器,或者把变频器与潜水泵之间的联接线在高频磁心上绕几圈,如图5所示,以减小导线分布电容对变频器的影响。
4 同步电动机的变频调速
同步电动机的转子是极性固定的磁极,如图6(a)所示。大容量电动机的转子上有通入直流电流的励磁绕组,小容量电动机的转子则多用永久磁铁。由于转子的S极与定子旋转磁场的N极牢牢吸住,转子就跟着旋转磁场一起旋转起来,两者的转速完全一致,转子的转速一定等于同步速,转速n始终为n=60f/p不变(式中f为工作频率,p为电机极对数)。由于不需要从电网吸收无功电流,转子上既无铜耗又无铁耗,所以同步电机在很宽的负载范围内能保持接近于1的功率因数。
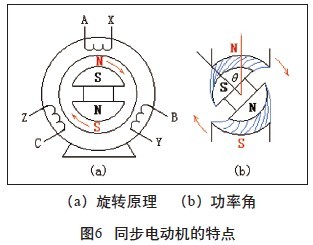
当转子带上负载后,转子磁极的轴线只是和定子旋转磁场的轴线之间产生了一个夹角θ(称为功率角),但仍被定子磁场牢牢地拉住,而不会减慢转速,如图6(b)所示。
同步电动机电磁转矩的大小,在一定范围内,和θ角成正比。
当θ= 时,电磁转矩最大。实际运行时,θ<,以留有余地。
时,电磁转矩最大。实际运行时,θ<,以留有余地。
一旦由于负载的突然增加,使电动机带不动负载,转子的转速慢了下来,同步电动机将‘失步’,转子就会停下来。因此同步电机变频调速时必须时刻控制这一夹角在允许的范围内变动,这一点就是同步电机变频和异步电机变频的主要区别。
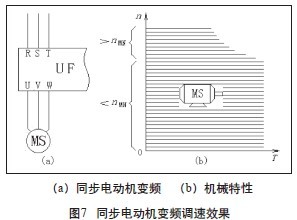
同步电动机变频后,具有特别‘硬’的机械特性,如图7(b)所示。故可以用在需要同步运行和精密控制的场合,还可以用在伺服系统内。
同步电动机在实现变频调速时,有两种方法:一种是自控式变频调速,需要用专用的变频器,对同步电动机实现矢量控制,这里不予深入讨论。另一种是他控式变频调速,就是采用普通的变频器。这时,需要注意的问题有:
(1)控制方式
只能用V/F控制方式。
(2)加速时间与方式
为了使同步电动机在启动过程中不失步,加速时间应预置得长一些,并采用S形加速方式。
(3)同步电机启动时的投励过程的控制
同步电机通常有“先投励、后同步启动”和“先异步启动、后顺极性投励”两种启动方式。变频启动如果采用先投励,后同步启动的工作方式,常会出现转子位置判断不正确导致电机启动失败。因此,同步电机实现变频调速时,建议采用异步启动,顺极性投励方式,实现额定启动力矩,将同步电机启动到8~10Hz左右再进行顺极性投励,具体所投励磁大小及投励时频率可以根据不同应用场合调试确定。至此,电动机转子磁场和定子磁场间夹角经过小量有阻尼震荡后,电机转子磁极被定子磁极可靠吸引,同步电机进入同步运行状态。变频器按照预先设定的加速度,逐渐加速到给定频率。此时,同步电机电枢电压矢量与转子磁极位置之间的夹角逐渐拉大到某一常值,电机转子磁极在定子磁场的吸引下逐渐加速至期望转速,同步电机起动过程完成。针对要求重载启动的工况,为了达到更大启动力矩,可以适当提高变频装置输出电压和同步电机的励磁电流。
(4)同步电机稳态调速和励磁调节过程
同步电机采用变频调速时,为了解决变频装置和同步电机间的配合问题,电机速度改变同时变频装置也会协同调节当前励磁电流大小和改变输出电压对应值(不是简单的恒v/f控制)。在某一设定频率点以上范围运行,变频器采集同步电机功率因素,通过内置PID调节器实时控制同步电动机的励磁电流,实现恒功率因数调节,功率因数0.90(超前),变频器通过发4~20mA指令给同步电机的励磁调节器调节励磁电流;在此频率以下范围运行时,励磁电流由变频器根据当前运行工况,输出4~20mA信号给励磁调节器去调节,采用变频变励磁电流调节。调节方式切换由变频器自动完成,而且调节方式的切换点频率可以通过参数设置。
(5)同步电机正常停机和故障灭磁过程
在正常停机时,变频器驱动同步电动机转速至停机,然后停止变频器输出即可。减速过程中,在恒功率因素频率点以上运行,励磁电流根据恒功率因素来调节,在频率点以下范围运行,采用变频变励磁电流方式运行。此过程不需要进行灭磁。
在运行期间出现故障,若变频器外系统出故障,需紧急停机,可以直接跳开高压侧输入开关和变频器输出开关,同时跳开同步电机励磁装置。若变频器系统出故障要紧急停机时,变频器立刻停止输出,通知同步电机励磁装置进行可控硅逆变灭磁,再通过故障信号跳开高压侧输入开关和变频器输出开关。
参考文献:
[1] 张燕宾. 变频调速的应用与实践[M].
[2] 项立峥, 梁安江, 张海燕. 交流同步电机高压变频调速装置成功投运及技术浅析[J].
黄志辉(1970-)
男,湖南南县人,学士,工程师,主要研究方向为自动控制及应用。
张燕宾
男,变频器应用专家,原宜昌市自动化研究所副所长
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号