



.jpg)



当前位置:首页»案例
- 造船龙门起重机大车纠偏控制系统的设计与应用
-
企业: 《自动化博览》 日期: 2014-07-14 领域: 自动化软件 点击数: 459 摘要:造船龙门起重机随着造船业的迅速发展也跟着快速发展起来。在大车行走过程中,由于龙门起重机的刚腿和柔腿之间的跨距较大,因此要求刚腿和柔腿的位移要始终保持一致,如果偏差过大则会造成大车偏斜运行等严重后果。本文结合软硬件的设计,详细介绍了大车纠偏控制系统从位置检测到位置闭环控制是如何实现大车的实时纠偏。
关键词:造船龙门起重机;位置检测;位置闭环控制;纠偏控制
Abstract: With the rapid development of shipbuilding industry, the shipbuilding Goliath gantry crane equipment has made great progress. Due to the distance between the fix leg and flex leg of gantry crane is long, the two legs must keep moving synchronously all the time when the gantry is moving. If the deviation of gantry is too large, it will result in serious consequences. According to the design of hardware and software, the paper introduces the gantry skew control system in details based on the position detection and position close-loop control.
Key words: Shipyard goliath gantry crane; Position detection; Position close-loop control; Gantry skew control
1 引言
随着我国船舶工业的迅速发展,造船业市场呈现兴旺势头,所建船舶的吨位越来越大,各地船厂也大都由船台造船向船坞造船发展,船坞的主要配置设备——大型造船厂龙门起重机的需求也快速增长,起重机的提升能力从600吨增加到1200吨甚至1800吨,跨度也从170米增大到239米。造船龙门起重机由于跨度长、起升高度高等特点,大车两侧的刚腿和柔腿运行一段时间后,会出现行走速度和行走距离不同、大车轨道高低、平行偏差和车轮直径的偏差、载荷分布不均引起运行阻力的不同、电动机转速的偏差等情况,因此经常会导致大车偏斜运行现象的发生。偏斜运行主要表现在刚性腿侧大车与柔性腿侧大车运行不一致使主体部分偏向大车一侧,造成轮缘啃轨。一旦偏斜运行现象严重,起重机就会失去平衡,使之无法向前开动,同时将会导致造船龙门起重机的钢结构承受附加载荷而发生侧翻等安全事故,给驾驶员的人身安全带来一定的威胁,同时也给企业造成一定的经济损失。因此,只有采用合理的技术手段,才能避免大车偏斜运行,保证造船龙门起重机安全稳定的工作。
2 几种常用纠偏措施
为了避免起重机大车在行进过程中偏斜运行导致啃轨现象的发生,通常采用纠偏技术,将大车在运行过程中,两侧偏斜量的值控制在一定的范围内。在现有的纠偏技术中,为了保持两侧大车运行速度和位置在造船龙门起重机运行过程中同步运行,采用的纠偏措施虽然不同,但其基本原理是一致的:将编码器、感应开关、限位开关或传感器等采集到的信号,通过控制系统输入到PLC中,进行自动纠偏或手动纠偏。下面是几种常用的纠偏措施:
2.1 采用增量型编码器
随着变频驱动技术的快速发展,变频调速控制广泛应用于造船龙门起重机的大车运行,在刚性腿侧和柔性腿侧的大车对应的电动机上设置增量型编码器,测量与比较两侧的实际速度,当这两台电动机平均转速相差一定数值时,根据编码器输入PLC的脉冲数量进行纠偏。
2.2 采用绝对值编码器
检测轮安装在刚性腿侧和柔性腿侧的大车上,在检测轮上安装绝对值编码器(也可以将编码器安装在无轮缘的被动车轮上),编码器的转数输入到PLC中,比较刚腿侧大车和柔腿侧大车实际位置位移量进行纠偏。
2.3 采用磁感应开关和磁块硬件校验
平行安装一些感应磁块在刚性腿侧和柔性腿侧的大车轨道旁,两侧的大车上各安装一套磁感应开关,通过电控系统测量出刚性腿侧和柔性腿侧的磁感应开关动作的先后,并输入到PLC中进行纠偏。
2.4 采用位移传感器或限位开关
当刚性腿侧和柔性腿侧的大车偏斜运行时,主梁与柔性腿的夹角将发生改变。将位移传感器或限位开关安装在柔性腿顶部,通过传感器或限位开关输出的信号进行纠偏。
3 大车纠偏控制系统功能设计
造船龙门起重机的大车跨距(大车刚腿与柔腿之间的距离)一般在200米左右,跨距非常大。大车的刚腿与主梁是刚性联结,柔腿与主梁的联结可以有小范围的旋转,以保证大车运行时如有偏差不会导致钢结构受到挤压而损坏。但大车高速行走时刚腿与柔腿之间的位置偏差不能超过1米,如果超过好几米,柔腿将被扭断,整台龙门起重机将倒塌,从而发生安全事故。
大车的纠偏有2种方式:
自动纠偏:在PLC程序里通过位置环控制,自动实现,是正常运行时的纠偏模式;
手动纠偏:通过单边动作(只低速移动刚腿或柔腿)来纠正偏离,非正常状态时使用。
3.1 位置检测和位置闭环控制
3.1.1 位置检测
从功能上来看,PLC获取的位置值是否精确是位置控制能否达到要求的关键因素,因为位置值是通过传感器测量,位置环控制都是在PLC程序里面实现,而PLC程序出错的概率非常低,因此大车位置的测量非常重要。
为了确保测量的位置值准确反映大车的位置值,在PLC程序中采用2种方法同时计算位置值:
(1)绝对值编码器
分别在大车刚腿、大车柔腿安装绝对值编码器,方便刚腿侧和柔腿侧位置值的测量。
(2)高速计数模块
高速计数模块 FM450-1/FM350-1接收大车刚性腿和柔性腿电机的脉冲(增量)编码器信号,通过高速计数模块计算脉冲编码器的脉冲数,来计算各自的位置。其原理是:电动机每旋转一圈,对应机构的移动距离是固定的,而电机转一圈,脉冲编码器发出1024个脉冲,这样每个脉冲就对应于一个固定的机构移动距离。
在PLC程序中对以上2种方法测量的位置值进行比较,如没有偏差,则位置计算正确;如有偏差,则位置测量有误,不允许大车同步操作。
同时为了进一步确保位置值的精确,还设计了位置限位开关对位置值进行设置和检测,具体为:
在大车轨道旁边每隔25米安装一块磁铁,大车钢结构上相应位置安装一块磁力开关。调试时先将这些磁力开关触发时当前大车的位置值记录在rPOS_X中(X表示第几个开关),运行时当大车通过这些时,将PLC程序计算的位置值POS与rPOS_X 相比较:POS - rPOS_X = Pdif
当 Pdif < 1000mm ,将偏差Pdif 补偿到POS
当 Pdif ≥ 1000mm,大车停止,进行低速单边动作(只移动刚腿或柔腿),手动纠偏,将位置偏差消除,然后才能继续行走大车。这样大车每行走25米,位置值以及偏差可以校正一次,从而保证大车两侧行走一致。
标准程序功能块如下:

通过上面的2种测量方法和一种检测方法,获取的位置值非常精确,保证同步操作的准确和安全。图1所示为位置检测过程的程序框图。
3.1.2 位置环闭环控制
大车刚腿和柔腿在同步操作时位置偏差的允许范围是:刚腿和柔腿车之间< 1000 mm。如果位置偏差太大,将导致柔腿的扭断从而使整个起重机倒塌。

图1位置检测的程序框图
为了达到位置同步,需要增加位置控制。在速度环之外增加一个位置闭环控制,即大车柔腿有三个闭环控制:驱动器里面的电流环和速度闭环控制,PLC程序的位置环闭环控制,具体为:
(1)计算运行前大车刚腿和大车柔腿的位置偏差值ΔS。
(2)以大车刚腿为主,大车柔腿为从,组成主从控制,大车刚腿只有电流环和速度环闭环控制,大车柔腿速度闭环外还有位置环控制。
(3)当运行时,将同样大小的速度给定Vset发送给大车刚腿和大车柔腿,大车刚腿以这个速度给定运行,大车柔腿侧的速度给定是(Vset+Vadd )。
(4)在运行过程中计算大车刚腿和大车柔腿的位置偏差值ΔS1。
(5)运行过程中计算Vadd= F*(ΔS1-ΔS),即运行中位置偏差值折算成一个附加速度给定值给大车柔腿,使大车柔腿和大车刚腿之间没有相对运动,动态调节位置偏差,达到ΔS1=ΔS。
(6)系数F的取值:根据经验值,大车柔腿取0.85,为经验值,根据响应速度适当调整 。
(7)F和Vadd 需要在现场调试时取一个合适的值,即不要太灵敏也不要太迟钝;即运行过程位置偏差在允许范围内,同时从动机构的运行速度不要频繁大范围波动。
(8)从动机构的故障和停止信号对主从都起作用,确保同时运行或停止。vvvvvvvv图2所示为位置闭环控制的程序框图。

图2 位置闭环控制的程序框图
3.2 机械限位保护
在柔腿和主梁联结处安装位置偏离限位开关共6个,做硬件偏差保护;限位开关动作顺序如下:
(1)前偏离急停:柔腿往前偏离>1000mm,大车停止,必须手动纠偏。
(2)前偏离停止:柔腿往前偏离>500mm,大车停止,必须手动纠偏。
(3)前偏离减速:柔腿往前偏离>300mm,大车只能低速运行,可以自动纠偏。
(4)后偏离急停:柔腿往后偏离>1000mm,大车停止,必须手动纠偏。
(5)后偏离停止:柔腿往后偏离>500mm,大车停止,必须手动纠偏。
(6)后偏离减速:柔腿往后偏离>300mm,大车只能低速运行,可以自动纠偏。
限位开关的设置与PLC程序一起,达到硬件和软件的双重保护,确保安全。
3.3 纠偏控制程序
大车纠偏控制的程序框图如图3所示:
其中,大车运行速度给定VRef,刚腿速度VF=VRef,柔腿速度VFL=VRef+Vadd
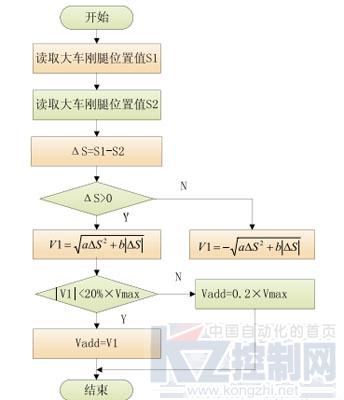
图3 大车纠偏控制的程序框图
4 结语
大车纠偏控制系统的应用对龙门起重机的安全运行具有至关重要的作用,一旦大车行走出现偏差则会引起严重后果。该系统已经在广州龙穴造船有限公司2台600吨/200米和2台600吨/176米大型造船龙门起重机项目中得到实际应用,大车以40m/min的速度运行时刚腿和柔腿的位置偏差在250mm以内,即大车纠偏功能良好,目前4台设备安全稳定运行。
参考文献:
[1] Rudnik, Siegfried. Container cranes Top performance with standard systems[J]. Energy Autom, 1990, 12 (2) : 4 - 7.
[2] SIEMENS. 西门子变频器SIMOVERT MASTERDRIVES矢量控制使用大全[Z]. 1999.
[3] 肖自立. 西门子控制系统在船厂龙门吊起重机上应用及其两机联机操作特殊功能实现[z]. 西门子专家会议, 2008: 254 – 261.
[4] 王吉明. 大型铸造起重机的全交流驱动系统的解决方案[J]. 起重运输机械, 2009 (3) : 50 – 54.
[5] 曹新, 朱劲, 蒋平. 大跨度龙门起重机的精确位置控制[J]. 机械与电子, 2006, (8) : 17 – 19.
[6] 何光. 起重机自动纠偏系统控制[D]. 武汉: 武汉科技大学, 2008.
作者简介
王吉明(1970-),男,江西永新人,高级工程师,硕士,现就职于西门子工厂自动化工程有限公司,主要研究方向为高端起重机电气系统的研发和应用。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号