



.jpg)



当前位置:首页»案例
- 基于贝加莱控制系统的扁平型直线感应电动机驱动立体停车库解决方案
-
企业: 贝加莱工业自动化(中国)有限公司 日期: 2014-07-20 领域: 变频器 点击数: 734 摘要:开发一种应用先进的直线电机驱动技术的新型自动化立体停车库,对于提高停车的地面利用率和存取速度,降低立体停车系统的故障率,提高其可靠性,具有关键作用。本文介绍了基于贝加莱工控系统的扁平型直线感应电动机驱动立体停车库解决方案,首先论述了三相扁平单边型直线感应电动机驱动的基本原理和立体停车库的布置及机电设备,重点描述了该类立体停车库自动控制系统的构成、主要功能和特点以及载车平板的平移和升降驱动,最后总结了直线电机驱动立体停车方案的优点。
关键词:直线电机驱动技术;立体停车库;平移驱动;Ethernet Powerlink;ACOPOSinverter变频器
Abstract: To develop a kind of new type three-dimensional automation garage by using advanced linear motor driving technology is a key factor for increasing parking ground utilization rate and speed of saving and taking cars, reducing failure rate of three-dimensional parking system and improving its reliability. A solution of three-dimensional garage with the flat-type linear induction motor driving based on B&R’s industrial control system is introduced in this paper. Firstly, the fundamental principles of the three-phase flat single sided linear induction motor driving are introduced, as well as the arrangement and related electro-mechanical equipment.Then the composition, main functions and characteristics of such stereo-garage’s automatic control system as well as the planar shift and lifting driving of the car loading plate are elaborated in details. Finally, the advantages of the linear motor driving stereo-parking scheme are summarized.
Key words: Linear motor driving technology; Three-dimensional garage; Planar shift driving; Ethernet Powerlink; ACOPOSinverter frequency converter
随着社会的发展和人民生活水平的日益提高,我国私人汽车的保有量急剧增长,城市的可利用空间却扩展较慢,停车难的问题日益突出,已成为影响市民生活的一个重要因素。
目前国外某些城市人口密度较大国家(地区)的大城市,如日本东京和新加坡城,在城市中心区域的大厦和大型公共设施旁以及部分高层住宅区建有大量与之配套的自动化立体停车楼,虽然存取车的自动化程度较高,但多采用传统的机电式。
如今我国的很多大城市也建有立体停车楼,大部分是自驾式多层停车楼,谈不上控制,少数自动化停车楼也几乎都是传统的机电式的,主要采用“电梯仓储式”和“水车式”。
传统的机电式方案 ,有的电力消耗较大(如“水车式”),有的机械结构复杂,设备故障率高,很难保证正常使用(如“电梯仓储式”)。因此,开发一种应用先进的扁平单边型直线感应电动机驱动技术的新型自动化立体停车库,对于提高停车的地面利用率和存取速度,降低立体停车系统的故障率,提高其可靠性,具有关键作用。
1 直线感应电动机的平移驱动原理
直线感应电动机(Linear Induction Motors 简称LIM) 是一种将电能直接转换成直线运动机械能,而不需要中间转换机构的传动装置。可将它看成是一台旋转电机沿径向剖开,然后沿电机的圆周展开成的一条直线。直线感应电动机的工作原理与旋转感应电动机相类似,当直线感应电动机初级的三相绕组被交流电流激励时,便在气隙中产生行波磁场,次级在行波磁场的作用下,将感应出电动势并产生电流。气隙磁场与次级电流的相互作用产生电磁推力,在此推力作用下,初级与次级之间产生相对运动。如果初级固定,那么次级将沿着行波磁场运动的方向作直线运动;反之,若次级固定,初级将沿着行波磁场移动的相反方向运动[1]。
如图1所示,采用三相扁平单边型直线感应电动机驱动方案。在立体停车库的每层平面上安装一系列的纵向和横向直线电机初级块,在每个停车单元中各装设四个初级块,两纵向和两横向。每个初级块由多开口E字形硅钢片铁芯和三相绕组构成,其三相绕组的励磁相序决定了该初级块的旋转磁场方向以及对次级块所产生的水平推力方向。每一载车平板的底部与初级块磁路相对的部分覆盖铝板,作为直线电机的次级块。对直线电机的初级块绕组加以不同相序的励磁时,将对压在其上的次级块产生不同方向的水平电磁推力,同时次级块也受到竖直方向(法向)上的推力(自悬浮力)[1]。
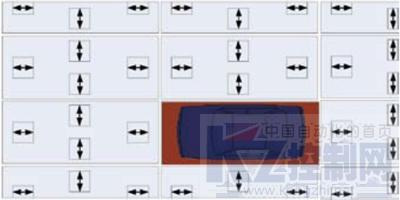
图1 直线电机驱动两维平移的基本原理示意图
当某一停车单元的两纵向初级块的磁场方向相同而其横向初级块的磁场方向相反时,则该停车单元的次级块(载板)在受到一定的自悬浮力的同时将驮载着汽车向前或向后移动,若与其前(后)相邻的第二位置的四个初级块的励磁情况与它一致,则该次级块(载板)继续前进(或后退)一个位置,其纵向平移运动规律可以此类推;当该停车单元的两纵向块的磁场方向相反而两横向块的磁场方向相同时,则其次级板在受到一定的自悬浮力的同时将驮载汽车向左或向右移动,若与其左(右)相邻的第二位置的四个初级块的励磁情况与它一致,则该次级板继续左移(或右移)一个位置,其横向平移运动规律可以此类推;由PLC的程序控制有关停车单元初级块的励磁顺序和旋转磁场方向,并借助于改变初级块绕组的励磁电流频率来调节次级块的移动速度,即可将所需要的次级板按设定路线和速度平移到指定的位置上。
通过PLC程序的控制和平移及垂直驱动,可在很短的时间内将拟存放的汽车从存放入口输送到所指定的某层某停车位置,也可迅速地将所需取出的汽车从库内的某停车位置取出来。上述方案也适用于立体仓库中的货物存取。
整个停车系统是由以PLC为核心的控制系统控制的,扁平单边型直线感应电动机、变频器和位置检测开关确保了载车平板的精确移动,传感器提供了系统状态和位置方面的持续操作数据,便于控制和监测。
2 扁平直线电机的特性分析和参数估算
2.1 扁平直线电机的驱动特性分析[2]
(1)速度与频率的关系
扁平直线电机的推力和同步速度与输入端的电压和频率关系密切,在电机额定输入线电压380V不变的情况下,改变输入频率,直线电机的同步速度将会发生变化。
其同步速度Vs=2Γf,式中Γ为极距,此时同步速度Vs只与频率f 有关,而实际运行速度Va = (1-s)Vs(s为转差率),如图2所示。
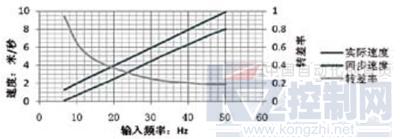
图2 速度与频率的关系
从图2中,还发现扁平直线电机的转差率随输入频率的增大而变小。
(2)推力与频率的关系
在扁平直线电机的推力测试中,如果保持输入电压不变,增高输入频率,则直线电机的堵动推力逐渐增大并在43Hz 左右达到最大值,之后又呈逐步下降趋势,如图3 所示。
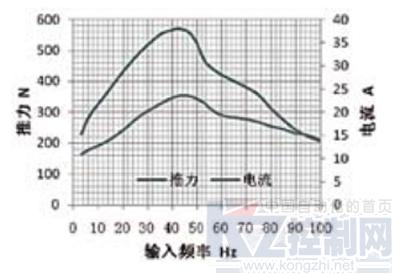
图3 推力与频率的关系
(3)推力与速度的关系
直线电机的加速过程是一种变加速过程,随着速度的提高,电机的推力和加速度都会随之减小,如图4所示。
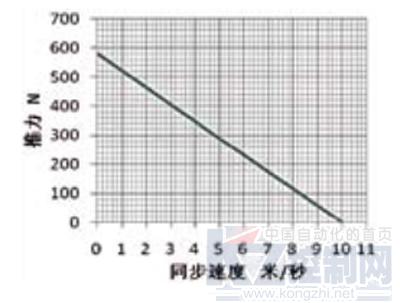
图4 推力与速度的关系
2.2 平移驱动扁平直线电机的参数估算
在该例中为使汽车平移保持较低的正常运行线速度(约2m/S),将该扁平直线电机的极距确定为60mm,正常工作频率为25Hz,其同步速度Vs = 2Γf = 2*60*25 = 3,000mm/s = 3m/s。从图2中可查得在这种条件下该直线电机的转差率s约为0.3,则实际运行速度Va = (1-s)Vs =(1-0.3)*3m/s = 2.1 m/s。
载车平板和汽车的最大重量Wmax为3,000kg,考虑到直线电机初级块对次级板的法向推力(自悬浮力),其对滑轨产生的实际正压力将比Wmax小一些。当其在滑轨上平移时,仅受到滚动轴承的滑动摩擦阻力。设摩擦系数μ 的范围为0.01~0.02, 这里取μ = 0.02,则最大摩擦阻力f max = μ *Wmax = 0.02 × 30,000N = 600N。从图3 中可看出,当该直线电机输入频率为25Hz时,负载电流约为18.5A,推力约为480N;而从图4 中可看出,当该直线电机运行速度在2.1m/s时,其推力在450N左右,驱动载车平板的2台扁平直线电机的推力之和约为900N,为最大摩擦阻力600N的1.5倍,也即载车平板(次级块)可以保持约2m/s的运行速度。
必须指出,直线电机特有的边缘效应产生的附加电流将使电机的损耗增加,功率因数降低而导致推力减小。另外由于滑轨安装误差造成的电机初次级间气隙不一致也是造成推力下降的重要因素。
3 立体停车库的结构和设备
3.1 立体停车库的建筑结构该立体车库拟采用钢筋混凝土框架结构,车库主体为12层(高31.2m),升降塔为13层(高34.2m)。每一停车层之间用混凝土楼板隔离,这样不但整体结构的刚性较好,而且有利于防火以及防止车辆油、水渗漏扩散。升降机房和每一停车层均设通风装置,每一泊位均设照明、火灾报警及自动灭火装置。
3.2 立体停车库的布置和机电设备[6]
同层内设置多车位,采用直线电机纵/横向平移驱动方式。虽然直线电机驱动的理论和技术是成熟的,但缺乏其在汽车平移驱动方面的实际经验和相关的技术标准。
该方案是建造一座12层地上立体停车库,停放的车型包括C级轿车、小面包车和SUV及以下尺寸和重量的车辆。每一停车层的层间距为2,600mm;每一停车位的容积是5,200mm(长)*2,250mm(宽)*2,200mm(停车净高)。每层虽然有6个平面驱动单元,但只能设5个停车位,因为与升降塔相邻的5号单元必须空置,这样同一层的车辆才能实现平面移动。该立体车库共设有60个车位,主体的外形尺寸为17,000mm(长)*5,200mm(宽)*31,200mm(高)(升降塔高34,200mm),占地面积约为100平方米,建筑面积约1,080平方米,每辆汽车平均占地面积为1.67平方米。其立面和底层平面布置如图5所示。

图5 60车位立体停车库立面和底层平面布置示意图
每一层的停车平面上纵横相交的滑轨,将其划分成6个单元(其中临近出/入口的单元作为平移缓冲空位,不能安排停车)。载车平板主体为用高强度、高刚度材料加工制成的平板,其上部全部覆盖带条纹的防滑硬质橡胶(防止车辆产生纵向滑动),其底部与初级块磁路相关的部分覆盖一层10mm厚度的铝板(直线电机的次级)。铝合金框架镶嵌在载车平板的四周,其底部安装有若干组滚珠,载车平板通过它们与纵向和横向滑轨接触,以减小滑动时的摩擦阻力;在驮载汽车的极限负重情况下(按最大负荷3,000kg考虑),载车平板的铝质底部与停车单元初级块E字形铁芯的上端部的间隙为1.5mm~2.5mm。每一停车单元均装设有纵向和横向载车平板光电定位检测装置、烟雾及火源检测装置以及自动消防装置。
该停车库设有汽车升降塔及一个可升降的存(取)车入(出)口单元,其上设有载车平板纵向和横向光电定位检测装置以及汽车的前、后、左、右和高度限制光电检测装置。在升降塔的顶部装设有一台供入(出)口单元载车平板升降的卷扬驱动装置,采用三相交流异步电动机变频调速控制方式,其升降、调速和各层的平层控制方式与一般的电梯控制类似。
该自动化立体停车库设有可供选择的PLC程序自动和PLC手动控制两种工作方式;通过触摸屏的HMI画面实现存/取车数据输入、操作和运行状况监视;还设有自动刷卡缴费、烟雾和火灾检测报警、电话预约取车和数据/事件记录及管理系统。
4 基于贝加莱工控装置的立体停车库自动化控制系统
4.1 系统构成[5]
该立体停车库自动控制系统以PLC为核心,采用贝加莱的X20系列PCC(可编程计算机控制器)作为主控制器,配置了X20CP1486标准CPU模块1块和I/O模块若干块(X20系统背板采用X2X Link总线传输,传输速率为12Mbit/s),其中含数字量输入点约300余点(主要用于各停车单元和升降机构的位置检测输入)和数字量输出点300余点(主要用于各停车单元初级块绕组变频激励的选通信号输出)以及与之配套的电源模块X20BR9300若干块。根据本文2.2节的估算结果,平移驱动扁平直线电机的负载电流为16~20A,按具备驱动2台直线电机的功率考虑,选择400V 22kW等级的变频器。按照最优化分配驱动资源的原则,该立体车库12层的72个平移驱动单元可共用4台变频器。该系统共配置了6台400V 22kW平移驱动变频器(含升降间的载车单元单独配置的2台)和1台400V 30kW升降驱动矢量控制变频器,它们均选用贝加莱的ACOPOSinverter系列。
该立体停车库的监控系统则配置了1台集成UPS的贝加莱APC910新型工控机和1台Automation Panel触摸屏。APC910主要用于系统设置、后台监视、数据存储、事件记录和收费管理,一旦外部电力供应中断,UPS就会对数据进行安全备份并执行正常关闭程序,以防止未保存数据的丢失;触摸屏主要用于工作方式选择、在线存取车输入、在线监视、手动操作和报警信息显示。
该系统采用了Ethernet POWERLINK实时以太网技术,X20CP148与7台ACOPOSinver ter系列变频器通过Ethernet POWERLINK实现实时高速数据通讯;而X20CP1486与APC910工控机和Automation Panel触摸屏之间,则通过工业以太网交换机实现数据通讯。
在软件方面,采用了贝加莱的Automation Studio集成软件开发平台,全部应用软件均基于该平台完成设计和开发。
该立体停车库自动化系统硬件架构如图6所示。
4.2 载车平板的平移和升降驱动
按照最优化分配驱动资源的原则,一层需配置4台变频器,即6个平移单元的前、后、左、右刺激块绕组各由1台变频器激励。考虑到升降机构和汽车进、出需要时间(因楼层高低而不等,约在20s~ 50s范围内),准备下一次存(取)车的有关层可利用这个时间段来完成平移驱(最远单元与进(出)口单元之间所需的5次平移时间之和在20s以内),故该立体车库12层的72个平移驱动单元可共用这4台变频器。每层有6个平移驱动单元,每个驱动单元各装备有2个纵向初级块(前、后)和2个横向初级块(左、右),该6个单元共有24个初级块,共用4台400V 22kW变频器。它们的驱动对象具体分配如下:1#变频器:第1~6单元的6个前初级块(12层共72个);2#变频器:第1~6单元的6个后初级块(12层共72个);3#变频器:第1~6单元的6个左初级块(12层共72个);4#变频器:第1~6单元的6个右初级块(12层共72个)。升降间的载车平移驱动单元也装备有2个纵向初级块(前、后)和2个横向初级块(左、右),它们各由1台400V 22kW变频器供电激励。
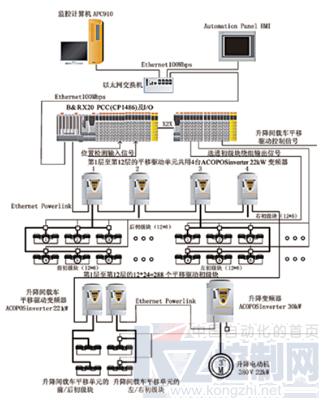
图6 立体停车库自动化系统硬件架构图
根据拟存、取车单元的位置,PLC自动安排次级块(即载车平板)的最佳运动路线,共拟定了存车和取车运动路线各5种。并基于PLC程序控制,自动按顺序和所需相序选择接通相关初级块的纵向和横向绕组,通常需要同时并以相同方式激励相同驱动方向上的相邻两个平移驱动单元的初级块绕组。
载车平板的升降卷扬装置由1台22kW三相异步电动机驱动,配置1台400V 30kW矢量控制变频器。
上述6台400V 22kW平移驱动变频器以及1台400V 30kW升降驱动变频器均由PLC通过Ethernet Powerlink 实时高速以太网实施控制。载车平板的平移和升降驱动简化原理如图7所示。
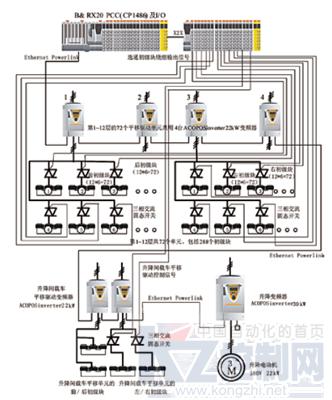
图7 载车平板的平移和升降驱动简化原理图
4.3 主要功能及特点
4.3.1 主要功能
(1)设有自动和PLC手动控制两种存取车工作方式,通常采用自动方式,手动方式仅用于调试、维修和故障处理。
(2)在入(出)口单元上设有载车平板纵向和横向光电定位检测装置以及车辆的前/后、左/右和高度限制光电检测装置,以限制存入车辆的外形尺寸并控制其初始位置,为后续流程创造条件。
(3)通过触摸屏的HMI画面输入存/取车数据,借助PLC程序自动确定的路线和平移及垂直驱动,可迅速地将所需存放的汽车输送到自动分配的停车位置,也可迅速地将所指定的汽车从库内取出。
除HMI操作外,还可以通过IC卡轻松实现操作。把车驶上载车平板,熄火并确保车辆停止,然后将卡放在读卡器上以指示系统自动操作,于是该停车系统将会自动将车辆送入泊位。
(4)通过触摸屏的HMI画面实现操作和运行状况监视、事件和报警信息显示等功能。
(5)载车平板与其驮载的车辆一一对应绑定;存(取)车数据存储和事件记录。
(6)自动刷卡缴费及电话预约存/取车等管理功能。
(7)设有载车平板光电定位检测、烟雾和火灾检测报警以及自动消防等安全功能。
4.3.2 系统特点
(1)采用了三相扁平单边型直线感应电动机平移变频驱动方案,结构简单,故障率低,速度快,运动平稳。
(2)采用了Ethernet POWERLINK实时以太网,它能支持100Mbps的数据传输速率和最大200uS的循环周期,对于确保高速、高精度的载车平板位置控制来说至关重要;Ethenet POWERLINK确保了运动任务与逻辑任务的同步,并提高了所控制的平板和升降机构的运动效率;Ethernet POWERLINK灵活的拓扑架构,使其开放性极强,在硬件上易于扩展和升级。
此外,POWERLINK支持Safety技术,在未来,随着产品进入国际市场以及国内开始执行机器安全的IEC61508标准,POWERLINK的Safety技术可以达到SIL3等级的功能安全一致性测试要求,确保机器制造商在满足安全要求的同时降低认证的费用。
(3)贝加莱的PCC采用了类似于大型计算机的Runtime定性分时多任务实时操作系统,可将控制要求分成多个任务并且在一个扫描周期内分段执行,以真正满足系统对实时性的要求。
(4)贝加莱的Automation StudioTM集成软件开发平台支持ANSI C、B&R Automation Basic、梯形图LD、指令表IL、结构化文本ST、顺序功能图SFC等多种标准的开发工具,具有强大的数据运算和处理能力。同时,该软件平台中还包含了丰富的库和功能函数,Visual Components 则集成了创建高性能优化用户界面所需要的所有工具,使编程人员在解决标准问题时更加简单、省时和高效,可大大降低开发成本。
Automation StudioTM将控制器、驱动器、数据通信和显示集成于同一个开发环境中,对纳入系统的所有自动化部件完成集成和配置任务,并能准确地识别硬件组件,提供直观准确的诊断功能、远程诊断功能以及开放式接口。它的硬件和软件都是模块化的,可以根据控制需要组合成工艺所需的专用控制系统,并具有灵活自由的联网和扩展能力。Automation StudioTM 是研发过程透明性和机器高效运行的保障,该系统的全部应用软件均基于该平台完成设计和开发。
5 直线电机驱动立体停车方案的优势
(1) 高效、安全地利用停车空间,节约城市宝贵的土地资源
在立体停车库的同一层面上的汽车紧密排列,其纵向和横向平移采用直线电机原理驱动,而进/出库口的垂直升降则采用与电梯类似的传统的旋转电动机驱动方式。
由于在输送车辆过程中不涉及汽车发动机和驾驶员,整个设施不需要斜坡、过道、司机出入和逃生通道等,因此上述方案可高效率地利用停车空间,节约城市宝贵的土地资源。
(2)设计灵活
能够满足不同的空间条件和要求,可以设计为平面、竖直、地上、地下或者组合结构。
(3)结构简单、故障率低、可靠性高
扁平型直线感应电机平移驱动方式没有齿轮减速器、链条、链轮等中间传动环节,较传统的机电式平移驱动机构简单得多、故障率低、可靠性高。
(4)提高存/取车速度
由于车辆的纵/横向平移采用直线电机电磁驱动原理和全自动化工作方式,故其移动准确而迅速,在确保车辆安全的前提下能显著地提高存(取)车的速度,节约时间。
(5)能避免车身擦挂及车辆损坏和偷盗事件发生
车辆移动和存取的特点决定了其能够有效地避免由司机驾驶存/取车辆时可能产生的车身擦挂以及场地或路边停车时可能发生的车辆损坏和偷盗事件。
6 结束语
利用贝加莱定制化的控制系统解决方案和扁平单边型直线感应电动机驱动方式,设计了一种60车位的自动停车系统方案。贝加莱自动化系统通过将控制器、驱动器、通信和显示集成于同一个开发环境中,具有低成本和高效率的特点。其先进的自动停车系统将确保在城市中停泊的车辆能够高效地利用有限的空间,从而缓解城市停车难的状况。
参考文献:
[1] 叶云岳. 直线电机原理与应用[M]. 北京: 机械工业出版社, 2006.
[2] 刘强, 杨少华. 直线感应电动机在RGV穿梭车上的应用研究[J]. 自动化信息, 2014 (3).
[3] 邓琼华, 王丰元, 程琳. 立体停车库及其装备设计[J]. 中国科技论文在线, 2011, 6 (11).
[4] Karel Gloser. 城市停车解决方案[Z]. 贝加莱应用案例, 2011, 3.
[5] 宋华振. 贝加莱数控激光切割机控制系统方案[Z]. 贝加莱工业自动化应用案例, 2012, 1.
[6] 严健. 直线电机在立体停车库中的应用[J]. 自动化信息, 2006 (10) .
作者简介
周晓霞(1966-),女,甘肃天水人,本科,高级政工师,现就职于贝加莱工业自动化(上海)有限公司市场部负责市场支持等工作。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号