



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 基于DSP的放卷张力控制系统的研究 技术领域 工厂信息化 行业 简介 内容  谈雪梅(1969—)
谈雪梅(1969—)
女,江苏常州人,高级工程师。主要研究方向为微控制器及其应用与研究。
摘要:卷绕线控制系统中,张力控制是十分重要的一环,控制的好坏直接影响到产品质量及生产效率的高低,同时张力控制系统控制复杂,故研究较为困难。针对以上问题,提出一种基于DSP的放卷张力控制系统,以放卷张力控制系统为研究对象,在深入分析自动卷绕线张力控制系统放卷部分受力情况的基础上,推导了放卷张力系统的数学模型,指出张力系统状态方程的建立方法。详细阐述了控制系统的硬件结构和软件结构,并通过实验验证了该系统具有良好的张力控制效果。
关键词:数字信号处理器;张力控制;建模;放卷
Abstract: Tension control is a very important part of process control in winding control system. The quality of control decides the product quality and productivity. Meanwhile, it’s very difficult to study the complicated tension control. In this case, the paper presents an unwinding tension control system based on DSP with unwinding tension control system as research object. It derives the math model of unwinding tension system, states the setup method of tension system state equation based on thorough analysis to the unwinding part force situation of auto winding tension control system, illustrates the hardware and software architecture of the control system and justifies that the system has good tension control effect by experiments.
Key words:DSP;Tension Control;Modeling;Unwinding1 引言
在纺织、印刷、钢铁等行业中,张力控制是十分重要的一环,控制的好坏直接影响到产品质量及生产效率的高低,同时张力控制系统控制复杂,故研究较为困难[1][2]。针对以上问题,本文以放卷张力控制系统为研究对象,在分析张力控制系统放卷部分受力情况的基础上,推导出放卷张力系统的数学模型。在理论分析的基础上,提出一种基于DSP的放卷张力控制系统,详细阐述了系统的硬件结构和软件设计,实验验证了该系统的可行性与正确性。
2 放卷系统的受力分析与数学模型
本文对放卷部分张力控制系统进行研究,放卷张力控制系统的物理模型如图1所示[3][4][5]。
TS为张力传感器,TC为张力控制器,MB为磁粉制动器, v为卷材走速(m/s),r为卷芯半径(m),R为卷带半径(m),w为卷带卷速, T为磁粉制动器的输出力矩(Kg.m), I为控制电流。系统的工作原理为:当卷材的张力值与设定值不一致时,控制器经运算后输出相应的控制电流I,改变磁粉制动器输出的制动力矩T,以达到控制张力的目的。
图1 放卷张力控制系统简化模型卷筒匀速运转时,根据扭矩平衡公式:
 (1)
(1)
则静态动力方程为:
 (2)
(2)
F为张力,R为卷筒实时半径,T为控制转矩, 为摩擦阻尼系数,w为转速。由式(2)可知只需保持T+w随半径R成比例变化即可保证张力稳定。
为摩擦阻尼系数,w为转速。由式(2)可知只需保持T+w随半径R成比例变化即可保证张力稳定。
当卷筒受到干扰,速度和张力发生变化时产生加速度,得到动态平衡方程:
 (3)
(3)
J为卷筒的转动惯量。
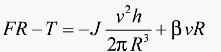
由式(1),(2),(3)可得:
 (4)
(4)
由式(4)可知,惯量J、转速w、加速度dw/dt、半径R都对张力有影响,增大了系统的控制难度。
2.1 速度v对张力的影响
卷筒卷绕一周需要一定时间,故可将半径R在一段时间内看作定值,假设J值稳定,讨论速度对张力的影响。
设在时间增量dt内,长度增量为dl,半径增量为dR,料厚为h,线速度为v,则卷筒端面面积增量为:

即: (5)
(5)
根据圆周运动角速度公式 ,则有:
,则有:
 (6)
(6)
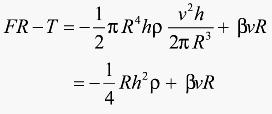
把式(6)代入式(3)可得:
 (7)
(7)
式中: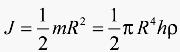 ,其中
,其中 为占积率。
为占积率。
代入式(7)可得:
 (8)
(8)
 (9)
(9)
式(9)表明,当其他条件不变时,卷材的线速度增大则其张力也增大,反之亦然。当速度有较小的变化,都会引起张力的较大变化。
2.2 卷径R实时变化对张力的影响
在系统的工作过程中,R实时变化导致放卷张力实时变化,同时放卷辊的转动惯量J值也实时变化。
在式3中,令J0为卷芯转动惯量,J为实时转动惯量,可得:
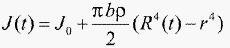 (10)
(10)
其中:b为卷材宽度, 为卷材的体密度。
为卷材的体密度。
将式(10)代入式(7)得:
 v (11)
v (11)
其中,及为不变的参数,可得:
 (12)
(12)
其中:

由式(12)可以看出,张力F受半径R(t)和速度v影响的同时,还与卷筒初始转动惯量,初始半径及卷筒上的卷材的密度有关。
2.3 张力扰动分析
半径的实时变化和速度的干扰是影响张力控制的最主要因素。因此在设计张力控制系统时应该着重考虑对半径的鲁棒以及克服速度冲击带来的干扰。
将式(12)变形,可得张力扰动方程:
 (13)
(13)
Mf和R分别为机械阻力矩和带卷半径:
 (14)
(14)
 (15)
(15)
其中B为带卷的宽度,L为自开卷点至检测点的间距, 为带卷的面密度, P0是卷轴的阻力矩,Rm为最大半径,
为带卷的面密度, P0是卷轴的阻力矩,Rm为最大半径, 为滚动摩擦阻力系数,g为重力加速度。
为滚动摩擦阻力系数,g为重力加速度。
3 系统的硬件设计
在对放卷张力控制系统理论分析的基础上,对本文提出的基于DSP的放卷张力控制系统进行硬件设计。
本系统采用的DSP为TMS320LF240系列,该系列的DSP控制器集实时处理能力和控制器外设功能集于一身,内部含有大量丰富的硬件资源,使得外部器件大为减少。本系统主要由张力信号采集电路模块、磁粉制动器驱动电路模块和MAX485差分通信电路模块和最小系统组成。基本设计框图如图2所示。
图2 系统硬件设计框图3.1 张力信号采集
本系统包含4路张力采集信号模块,每路张力信号采集部分主要由差动放大芯片LM324、V/f
变换芯片LM331和脉冲计数芯片74HC393组成。
张力信号经张力传感器转换为电压信号送给
LM324,LM324包括两级差动放大和一级比较放大,输出为0~10V电压信号。电压信号经第一级差动放大3倍,然后分别输出给第二级差动放大和比较放大器的输入端,当第一级差动放大后的信号小于等于100 mV,则经第二级差动放大后输出0~10 V的电压,当第一级差动放大后的信号大于100 mV,则经比较放大后输出10V的电压。
LM324输出0~10 V的电压送给LM331,LM331将0~10 V电压信号转换为0~10 kHz的频率信号,频率信号经光电隔离、波形整形后送给74HC393,进行脉冲计数,然后将数据送给TMS320LF2407A。
3.2 PWM驱动模块
TMS320LF2407A自带16路PWM波形输出功能,采样信号送到CPU后,经过处理产生一定占空比的PWM输出,经TLP251隔离并驱动MOSFET管,产生一定占空比的电流信号,送给磁粉制动器,来控制制动转矩,从而达到精确控制放卷张力的目的。
4 系统的软件设计
该控制系统的软件采用汇编语言编写,软件设计基于串行通讯模块、时序模块和张力控制模块。串行通讯模块包括接受上位机数据、置标志位和向上位机发送数据等;时序模块包括对开关操作的响应,系统运行的任务调度,通讯处理等;张力控制模块包括张力数据处理,张力预处理和张力控制等。张力控制主要是通过对张力误差的处理,采用工业控制中普遍采用的PID调节器控制磁粉制动器和磁粉离合器的电流,从而控制制动转矩,以保持张力的恒定。其程序流程图见图3。
图3 主程序流程图5 结论
本文在深入分析卷绕生产线张力控制系统放卷部分受力情况的基础上,推导出放卷张力系统的数学模型,并指出张力系统状态方程的建立方法。提出一种基于DSP的放卷张力控制系统,对硬件进行设计并给出控制系统的软件程序流程。该控制系统简化了系统结构,增强了整个系统的可靠性,而且根据工艺要求可进行灵活的功能修改,从而大大节约了成本。张力控制的误差控制在0.1kg以内,改造后放卷张力控制系统优良的运行性能验证了该控制系统的可行性与正确性。其它作者:
臧小惠(1980-),男,江苏常州人,硕士,主要研究方向为电力电子及电气传动。
参考文献:
[1] 韩利等.PS板生产线入口段开卷机及液压活套的恒张力控制[J].电气传动,2005,35(2):31~33.
[2] 汤旭晶等.拉线放卷恒张力控制系统的研究 [J].电气传动自动化,2006,28(1):34~35.
[3] 康家玉等.复卷机退卷张力控制的研究与应用[J]. 中国造纸,2004,23(6): 35-38
[4] 刘芙蓉.中心卷曲张力模型的探讨与仿真[J].系统仿真学报,2000,1(23):233~236.
[5] Hakan Koc, Dominique Knittel, Michel de Mathelin,Gabriel Abba. Modeling and Robust control of winding systems for elasticwebs. IEEE Transactions on Control Systems Technology, 2002, 2(10): 197-208.

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号