



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 多传感器信息融合及其在林业中的应用 技术领域 传感器 行业 石油天然气 简介 多传感器信息融合技术具有改善系统性能的巨大潜力,已经被广泛地应用于军事与非军事领域。本文针对我国林业生产相对薄弱的现状,介绍了多传感器信息融合技术在多功能林木采育作业关键技术装备中的应用。借助多传感器信息融合技术,该装备将为我国人工林、速生丰产林的高效利用提供技术装备支撑,加快我国林业生产现代化的进程。 内容  段梅(1983-)
段梅(1983-)
女,北京林业大学,研究生,主要研究方向为特种机器人、机电一体化。基金项目:国家科技支撑计划“多功能林木采育联合作业关键技术装备”资助。
摘要:多传感器信息融合技术具有改善系统性能的巨大潜力,已经被广泛地应用于军事与非军事领域。本文针对我国林业生产相对薄弱的现状,介绍了多传感器信息融合技术在多功能林木采育作业关键技术装备中的应用。借助多传感器信息融合技术,该装备将为我国人工林、速生丰产林的高效利用提供技术装备支撑,加快我国林业生产现代化的进程。
关键词:多传感器;信息融合;林业装备;应用Abstract: Multi-sensor information fusion has been generally applied to military and Non-military areas with its great potential of improving system performance. For the weak status of our forestry industry, this paper introduces application of multi-sensor information fusion to Multi-function pivotal techno-equipment of forest cutting and cultivating. In virtue of multi-sensor information fusion, the equipment will provide technology and equipment support for efficient utilization of our Plantation, and accelerate modernization of our forestry industry.
Key words: multi-sensor;Information fusion;forestry equipment;application1 引言
随着科技的发展,传感器性能获得了很大的提高,各种面向复杂背景的多传感器系统大量涌现。由于信息表现形式的多样性,信息数量的巨大性,信息关系的复杂性,要求信息处理的及时性,都已大大超出了人脑的信息综合处理能力。为此,一个新兴的学科——多传感器信息融合便迅速的发展起来,逐渐成为一个十分活跃的热门研究领域,是多学科、多部门、多领域所共同关心的高层次共性关键技术。
20年来,多传感器信息融合技术越来越受到人们的普遍关注,被众多军事和非军事领域所引用。包括中国在内的许多国家都把它列为下一阶段重点发展的关键技术。2 信息融合的概述
2.1 信息融合的定义和基本原理
多传感器信息融合,也称为信息融合,是针对使用多个和(或)多类传感器的一个系统的特定问题而开展的一种信息处理的新方法。人们把信息融合的一般定义大致概括为:利用计算机技术对按时序获得的若干传感器的观测信息在一定的准则下加以自动分析、优化综合以完成所需的决策和估计任务而进行的信息处理过程。按照这一定义,各种传感器是信息融合的基础,多源信息是信息融合的加工对象,协调优化和综合处理是信息融合的核心。
传感器信息融合的基本原理就是像人脑综合处理信息的过程一样,它充分的利用多个传感器资源,通过对各种传感器及其观测信息的合理支配与使用,将各种传感器在空间上和时间上的互补与冗余信息依据某种优化准则组合起来,产生对观测环境的一致性描述和解释。
2.2 信息融合的结构模型
从多传感器系统的信息流通形式和综合处理层次看,更主要在位置级融合。其系统结构模型主要有四种[2,8,11,12],即集中式、分布式、混合式和多级式。

图1 分布式融合结构分布式结构如图1所示,其特点是每个传感器的检测报告在进入融合以前,先由它自己的数据处理器产生局部多目标跟踪航迹,然后把处理后的信息送至融合中心,中心根据多个节点的航迹数据完成航迹关联和航迹融合,形成全局估计。从系统的观点来看,分布式结构是一种最自然的、最合理的结构。因为分布式结构可以较低的费用获得较高的可靠性和可用性;可减少数据总线的频宽和数据处理的要求;当一个传感器降级,其观测结果对整个多传感器信息融合性能和结果的影响很小;它可以逐步增加要实现自动化功能的数量,而且能使系统结构适应控制中心的操作要求;并且也有与集中式结构相同或类似的精度。因此,在设计新的系统时,分布式系统已成为优先选用的方案[13]。
2.3 信息融合的应用
多传感器信息融合技术首先应用于军事领域,主要用于包括战术和战略上指挥、控制、通信及军事目标的检测、定位、跟踪和识别[14],即利用声纳、雷达、(热) 红外、激光、合成孔径雷达、卫星与航空航天图像等多种传感器与各种信息源, 以实现军事静止或机动目标(如深海中的潜水艇、水面上的舰艇、地面的坦克与运输车、空中的导弹与飞机以及太空的军事卫星等) 的检测、识别和跟踪。综合利用多种传感器信息的互补性和冗余性,提高了信息的确定性和可靠性,提高了低可观性目标的探测和识别能力,有助于提高决策的实时和准确性,同时也有利于降低系统的成本。
近年来,多传感器信息融合技术在工业机器人、工业过程监视、智能交通、医疗诊断等民用领域也得到了较快的发展。新的应用领域正在逐渐被发掘,例如, 多传感器信息融合被应用于遥感、遥测的图像处理、故障诊断以及一般的检测、控制等领域。多传感器信息融合的理论正在逐步完善, 随着其理论的发展,其应用也逐步得到推广。
3 信息融合算法
几十年来,学者们根据具体的问题, 提出过许多有效的融合算法。但目前还没有普遍适用的概念和统一的表达方式, 各领域的信息融合方案也是各不相同。现有的常见的融合算法可以概括为两大类: 经典方法和现代方法。
经典的融合算法是基于经典数学方法的一类融合算法。该类算法又可以分为估计方法和统计方法两类,主要包括:
(1) Bayes推理:随测量值的到来,不断更新假设的似然函数。可以处理不相关的假设和多条件问题,但它仍要求先验分布。
(2) 加权平均法:多个传感器对目标的同一特征进行测量,得到相同属性的信息,然后根据先验知识将多个相同属性的信息加权平均。
(3) D-S证据理论: 它实际上是Bayes理论的推广, 采用概率区间和不确定区间来求取多证据下假设的似然函数, 对假设进行推断, 视未知命题为“无用”而不分配先验概率, 只有到支持该命题的证据到来时才给它分配概率。
(4) 卡尔曼滤波法:用测量模型的统计特性递推决定统计意义下最优融合数据估计,实时融合动态的低层次冗余传感器数据。对于具有线性动力学模型, 且系统噪声和传感器噪声是高斯分布的白噪声模型, 卡尔曼滤波提供唯一的统计意义下的最优估计。
现代融合算法是根据人工智能理论、现代信息论等的发展而发展起来的一类融合算法,主要有:
(1) 模糊逻辑法:用某种模拟人类的思维习惯的模型系统地反映分布式多传感器系统中数据融合过程的不确定性,并通过模糊推理来完成数据融合, 得到预期的效果。
(2) 神经网络法:仿效生物神经系统的信息处理方式,通过有教师或无教师自学习算法进行网络学习,一旦学习完成,该神经网络就能够根据以网络权矩阵和网络拓扑结构形式存储的特征信息,得到了一种进行决策思维的模型结构,通过综合来自于各种不同传感器的信息,从中抽取出单一传感器无法提供的准确可靠信息。
随着研究的深入,不少新的处理算法不断地被引用于多传感器信息融合中, 如粗糙集理论、小波变换算法、进化算法等。
4 信息融合技术在林业生产中的应用
4.1 我国林业作业装备研究现状
我国有近4000万公顷的人工林面积[15],现有的人工林是以速生丰产林为基础发展起来的,再过2-3年人工林将逐步进入成熟林,依靠传统的人工抚育和采伐技术已经不能满足现代化林业生产的需要,未来的林业生产也要由劳动力集约型向技术集约型转变,以增加单位劳动力的生产效率,增加林区农民收入,这也是解决三农问题的一个方面;此外,人工林的抚育也具有季节性和应急性,在最佳的季节完成除草、间伐、整枝和应急性病虫害防治及运输,必须通过机械化提高效率,对于抚育间伐材的搬运和大中径材的整枝抚育作业,人工无法高质、高效地完成有关作业,需要机械化装备以实现安全高效地作业。
为了解决上述问题,北京林业大学正在研制适合我国主要人工林的集约化抚育、采伐多功能联合作业技术成套装备。
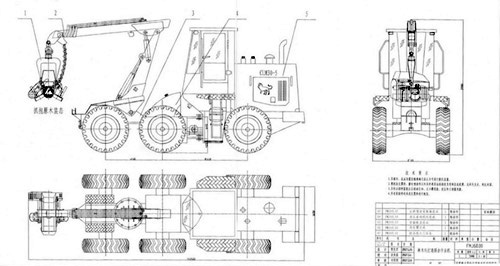
图2 林木采育联合作业机的总体图
图3 林木采育联合作业机虚拟设计图
4.2 信息融和在林业装备中的应用
多功能林木采育作业关键技术装备在高度非结构化环境下工作理论上是完全可以实现的。机器自主行走、机器视觉对图像的三维深度信息、方位、动态响应和暂不可视信息的获取和解释,机械臂和末端执行器对视觉传感器解释信号的理解等都需要多传感器信息融合技术的支撑。
4.2.1作业装备的半自主导航
为了适应作业环境的变化,该装备拟配置适合我国缓坡地人工林的小转弯半径轮式车辆底盘,以及适合我国陡坡地人工林的可伸缩的仿生式履带式车辆底盘,同时利用分布式多传感器系统及其信息融合技术,辅助驾驶员实现半自主导航。该装备可以利用自身的测距装置,如超声波和远红外传感器等,测量其与预先设定的目标之间的距离,利用CCD传感器获取周边环境及边界信息,同时结合地理信息系统和全球定位系统,通过信息融合技术对多个传感器反馈信息进行综合决策,形成对环境某一方面特征的综合描述,推算出自身的位姿,完成行走机构的半自主导航。
4.2.2目标的识别与定位
所谓三维视觉信息包括从摄像机到物体之间的距离、物体的大小和形状、各物体之间的关系等。根据人工林作业环境的特殊性和复杂性,该装备主要采用当前高度实用的关节型机械臂作为本体结构,获取对象的位姿,经过运动规划和运动学反解,求出关节空间的运动解来控制关节电机的运动。因此,对于机械臂的视觉系统而言,不仅要探测到目标的存在,还要计算出目标的空间坐标。获取对象三维坐标的方法有两种[16] :多目立体视觉,融合多个摄像机观察到的目标特征,重构这些特征的三维原像,并计算出目标的空间坐标;结构光法,选择激光、微波或超声波等光源,采用光栅法、移动投光法获取距离图像和反射图像,经联合分析测出物体的形状和空间分布。如果能利用多传感器融合技术将二者结合起来,由视觉系统获取原始平面图像,计算其形心坐标,再利用结构光法测量目标的深度信息,就能够实现更精确的路径规划和自主避障。
4.2.3执行机构的柔顺控制
根据不同作业对象的物理特性,应采取不同的抓持专用机构。这些机构主要包括判断模块、状态识别模块、控制模块和反馈控制模块。在判断模块和状态识别模块中,目标定位主要依据分布式视觉传感器和接近觉传感器的信息融合;抓取状态的判断是通过于将分布式触觉传感器、节力矩传感器和关节角度传感器的输出融合起来,得到腕部力矩的变化量、抓取力的变化量、滑动量和抓取位置的变化量,从而实现对目标的稳定抓取。
4.2.4故障检测
作业装备中开发和应用了许多液压控制子系统,如液压抓、液压阀木头等,因此其故障诊断技术也变得举足轻重。由于液压设备运行工况复杂,同时受外界环境的干扰以及传感器老化等因素的影响,所以传统的基于单参数的故障诊断所得结论已不能准确确定设备是否有故障。利用多传感器信息融合技术,从各个不同的角度获得有关系统运行状态的特征参量,如压力、振动、污染度等,并将这些信息进行有效的集成和融合,就能够比较准确地完成液压设备的故障分类与识别。
5 结语
多传感器信息融合技术能充分利用多传感器资源。如果笔者研制开发的多功能林木采育作业关键技术装备与多传感器信息融合技术实现完美结合,将获得对对象更为精确更为全面的认识, 具有扩展了系统的空间和时间覆盖范围、增加了可信度、减少了信息的模糊性、改善了探测性能、提高了空间分辨率、增加了测量空间的维数等诸多优点。笔者将研制出适合我国主要人工林集约化抚育、采伐多功能联合作业技术成套装备。该设备将真正达到一机多用,实现大面积速生丰产林的机械化、集约化生产作业,为我国人工林、速生丰产林的高效利用提供技术装备支撑。
其它作者:
刘晋浩(1958-),北京林业大学,教授,博士生导师,主要研究方向为机电一体化、特种机器人等。
参考文献:
[1] J. Linas, E.Walts.Multisensor Data Fusion. Artech House,Norwood,
Massachusetts,1990
[2] D. L Hall. Mathematical Techniques in Multisensor Data Fusion. Artech House, Boston, London,1992
[3] 赵宗贵,耿立贤,周中元等编译.多传感器数据融合. 南京:电子工业部二十八研究所,1993-2.
[4] 赵宗贵编译.数据融合方法概论. 南京:电子工业部二十八研究所,1998-4.
[5] 刘同明,夏祖勋,解洪成.数据融合技术及其应用. 北京:国防工业出版社,1998-9.
[6] 康耀红.数据融合理论与应用. 西安:西安电子科技大学出版社,1997-11.
[7] 何友.多目标多传感器综合算法研究.硕士论文, 武汉:海军工程大学,1988-2.
[8] 何友,谭庆海.多传感器系统分类研究.火力与指挥控制,1988(2):1~10.
[9] 何友,彭应宁.多传感器数据融合算法综述.火力与指挥控制,1996(1):13~22.
[10] 何友,陆大纟金,彭应宁.多传感器数据融合模型评述.清华大学学报,1996(9):14~20.
[11] 王亦农,何友,唐庆梅.分布检测系统评述.海军航空工程学院学报,1991(2).
[12] 何友,唐劲松等.多雷达综合跟踪算法研究. 烟台:海军航空工程学院研究学报,1991-7.
[13] A. Farina, F. A. Studer. Radar Data Orosessing. Vol.Ⅰ.Ⅱ. Reseach Press LTD,1985.
[14] 藏大进,严宏凤等.多传感器信息融合技术综述.工矿自动化,2005( 6) .
[15] 秦月,我国人工林的发展任重而道远——“天保”八年后的思考. 国际木业,2006(5).
[16] 罗志增, 蒋静坪. 机器人感觉与多信息融合. 北京:机械工业出版社,2002.

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号