



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 电压空间矢量变频系统圆形磁链逼近算法分析----Approximation Algorithm Analysis on the Circular Flux of the Voltage Space 技术领域 电源 行业 电子制造 简介 内容  许广彬 (1969-)
许广彬 (1969-)
男,在职硕士,淮南联合大学机电系教师,讲师、工程师,研究方向电力电子,工业现场控制技术。
摘要:本文首先阐明了电压空间矢量和磁链矢量相互转换和依存的数学关系,并在此基础上对实现接近理想的圆形磁链的电动机变频调速的方法及算法进行探讨,主要对输出矢量所落扇区的判断,电压矢量的作用时间及合成给出对应的数学分析,以期改进和优化SPWM变频控制过程。
关键词:电压空间矢量;矢量控制;圆形磁链;逼近算法Abstract: In this paper, we firstly illustrate the mathematical and logical conversion relations between the space-vector and the circular flux vector. On the basis of this relationship, we explore the methods and algorithms of the approximately ideal frequency control and primarily give out the corresponding mathematical analysis on the sector location of the output vector, the function time of the voltage space-vector as well as the composition of reference voltage vector in order to improve and optimize the SPWM process.
Key words: space-vector PWM, vector control; circular flux; algorithm
1 SVPWM控制策略
SVPWM是一种依据空间电压矢量切换来控制逆变器的控制策略。主要控制思路是采用逆变器空间电压矢量的切换来获得准圆形的旋转磁场,可使交流电动机获得了较好的动态响应性能,并减小了电动机的转矩脉动。SVPWM控制策略的数学模型是建立于“电机统一理论”和坐标轴系变换理论基础之上的,模型简单,物理意义直观,且便于微机实现。这种控制方法是着眼于如何使电动机获得幅值恒定的圆形磁场,换句话说,它是以三相对称正弦波电压供电时交流电动机的理想磁通圆为基准,根据特定的算法来决定逆变器中电子开关的开断时刻及开断宽度产生的实际磁通去逼近基准磁通。
2 电压矢量与磁链矢量的关系
逆变器的输出电压us(t)直接加到异步电动机的定子上,则定子磁链s(t)与定子电压us(t)之间的关系为:
 (1)
(1)
若忽略定子电阻Rs上压降的影响,则:
 (2)
(2)
公式(2)表示:定子磁链空间矢量 沿着电压空间矢量
沿着电压空间矢量 的方向,以正比于输入电压的速度移动,通过逐步合理地选择电压矢量,可以使定子磁链矢量
的方向,以正比于输入电压的速度移动,通过逐步合理地选择电压矢量,可以使定子磁链矢量 的运动轨迹纳入一定的范围,沿着预定的轨迹移动。图1所示是定子磁链矢量随着选择电压矢量的不同而运动的轨迹。通过选择合理的电压矢量,可使得磁链幅值在给定值
的运动轨迹纳入一定的范围,沿着预定的轨迹移动。图1所示是定子磁链矢量随着选择电压矢量的不同而运动的轨迹。通过选择合理的电压矢量,可使得磁链幅值在给定值 和允许的偏差
和允许的偏差 的范围内变化,使其平均值基本保持不变。当合理地选择
的范围内变化,使其平均值基本保持不变。当合理地选择 的施加顺序及时间比例,可形成多边形磁通轨迹,亦即逼近圆形轨迹。当多边形的边数大于40时,可以认为磁通轨迹近似为圆。当磁链矢量在空间旋转一周时,电压矢量也连续地按磁链圆的切线方向运动
的施加顺序及时间比例,可形成多边形磁通轨迹,亦即逼近圆形轨迹。当多边形的边数大于40时,可以认为磁通轨迹近似为圆。当磁链矢量在空间旋转一周时,电压矢量也连续地按磁链圆的切线方向运动 弧度,其运动轨迹与磁链圆重合。这样,电动机旋转磁场的形状问题可转化为电压空间矢量运动轨迹的形状问题来讨论。
弧度,其运动轨迹与磁链圆重合。这样,电动机旋转磁场的形状问题可转化为电压空间矢量运动轨迹的形状问题来讨论。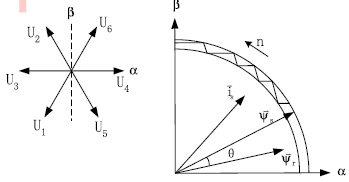
图1 异步电动机定子磁链的轨迹
(1)基本电压空间矢量
在三相逆变电路中,应用最广的是三相桥式逆变电路。采用绝缘栅极双极性晶体管(IGBT)作为可控元件的电压型三相桥式逆变电路,如图2所示。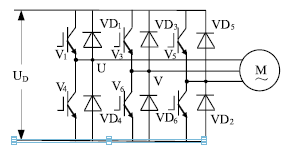
图2 三相电压型逆变器
假设交流电动机由理想三相对称正弦电压供电,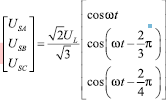 (3)
(3)式(3)中
 为电源电压;
为电源电压;
 为每相相电压的有效值;
为每相相电压的有效值; 为电源电压角频率。
为电源电压角频率。
采用电压空间矢量的概念,则有:
表1 逆变器的空间电压矢量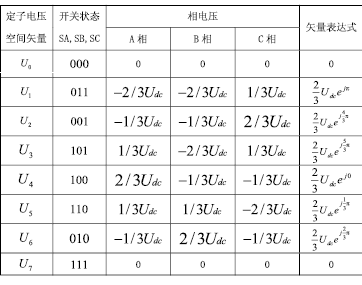
图2为三相电压型逆变器的示意图。对于180°导电型逆变器,其三个桥臂的开关器件总共可以形成八种开关模式,用SA,SB,SC分别标记三个桥臂的状态,规定当上桥臂器件导通时状态为1,下桥臂器件导通时状态为0,则逆变器的八种开关状态模式对应于八个电压空间矢量,见表1。
(2)磁链形成的原理
设逆变器输出的三相电压为UA,UB,UC,由图2可知加到电动机定子上的电压为:
USA=UA-UOO,USB=UB-UOO,USC=UC-UOO (5)
电机定子空间电压矢量US为: (6)
(6)
由于
所以逆变器输出的电压空间矢量为:
 (7)
(7)
由上式可知,在此系统中,对定子侧电压空间矢量的分析,可以转化为对逆变器输出电压空间矢量的分析。
当逆变器输出某一电压空间矢量 (i =1-8)时,电机的磁链空间矢量可表示为:
(i =1-8)时,电机的磁链空间矢量可表示为:
 (8)
(8)
式(8)中, 为初始磁链空间矢量,
为初始磁链空间矢量, 为作用时间。
为作用时间。
当 为非零电压空间矢量时,
为非零电压空间矢量时, 从
从 出发,沿对应的电压空间矢量方向,以理想磁链圆半径(
出发,沿对应的电压空间矢量方向,以理想磁链圆半径( )为半径进行旋转运动;当
)为半径进行旋转运动;当 为零电压空间矢量时,
为零电压空间矢量时, =
= ,磁链空间矢量的运动受到限制。因此,合理地选择六个非零电压空间矢量的作用次序与作用时间,可使磁链空间矢量端顺时针或逆时针旋转,形成一定形状的磁链轨迹。一般要求磁链轨迹尽可能接近圆形。空间矢量PWM调制技术(SVPWM)与正弦PWM(SPWM)相比,不仅使得电机转矩脉动降低,电流波形畸变减小,而且其直流电压利用率增加了15%,数字化实现更加容易。
,磁链空间矢量的运动受到限制。因此,合理地选择六个非零电压空间矢量的作用次序与作用时间,可使磁链空间矢量端顺时针或逆时针旋转,形成一定形状的磁链轨迹。一般要求磁链轨迹尽可能接近圆形。空间矢量PWM调制技术(SVPWM)与正弦PWM(SPWM)相比,不仅使得电机转矩脉动降低,电流波形畸变减小,而且其直流电压利用率增加了15%,数字化实现更加容易。
3 SVPWM的调制逼近算法
实时产生空间向量对称PWM的控制逼近圆形磁链算法的关键在于如何实时控制电压矢量的大小、方位、及其作用时间。SVPWM控制所用的载波信号也是等腰三角形,载波频率 。以扇区Ⅲ为例,为了输出的PWM波形在一个载波周期T内把每个矢量的作用时间都对称一分为二,同时把零矢量等分给
。以扇区Ⅲ为例,为了输出的PWM波形在一个载波周期T内把每个矢量的作用时间都对称一分为二,同时把零矢量等分给 、
、 这样在矢量切换时只有一个开关器件动作,降低了开关损耗和逆变器输出的谐波含量。那么在控制周期T内产生的开关序列为:
这样在矢量切换时只有一个开关器件动作,降低了开关损耗和逆变器输出的谐波含量。那么在控制周期T内产生的开关序列为:

改变时间 、
、 大小,即可得到不同相位的合成矢量和在其它扇区的PWM调制情况。在控制电路中,只要计算三相脉冲开通的前沿延迟时间
大小,即可得到不同相位的合成矢量和在其它扇区的PWM调制情况。在控制电路中,只要计算三相脉冲开通的前沿延迟时间 、
、 、
、 。用计算机实现开关函数,只需加入预定的开通时间即可。
。用计算机实现开关函数,只需加入预定的开通时间即可。
SVPWM的调制逼近算法的算法流程如图3所示。
具体步骤为:
(1)判断 所在的扇区;
所在的扇区;
(2)计算空间矢量作用时间;
(3)合成空间矢量。
下面分别进行详细介绍。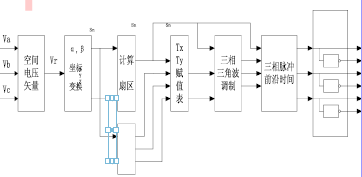
图3 SVPWM的逼近算法流程图
3.1 判断 所在的扇区
所在的扇区
在对异步电动机进行分析和控制时,均需对三相进行分析和控制,为了研究方便,进行坐标变换,将三维坐标系(a-b-c)投影到二维坐标系(α-β)上。如图4所示,划分为6个区域,称为扇区。每个区域都有一个扇区号。确定位于那个扇区是很重要的,因为只有知道 位于那个扇区,才能知道用哪一对相邻的基本电压空间矢量去合成 。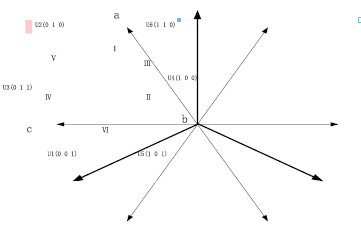
图4 空间电压矢量的坐标变换及扇区投影
如图4所示,将α-β坐标系与定子三相坐标系重叠画在一起,以便描述电压空间矢量在两个坐标轴上的相对位置。可知得联立方程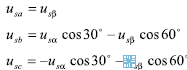 (9)
(9)计算得到
 ,
, ,
, 后,如果
后,如果 >0, N1=1否则N1=0;如果
>0, N1=1否则N1=0;如果 >0, N2=1,否则N2=0;如果
>0, N2=1,否则N2=0;如果  >0,N3=1否则N3=0。扇区的标号计算如下:
>0,N3=1否则N3=0。扇区的标号计算如下:
令 N1=Sign( ) N2=Sign(
) N2=Sign(  ) N3=Sign(
) N3=Sign(  )(Sign()为符号函数)
)(Sign()为符号函数)
扇区号
 (10)
(10)
3.2 计算空间电压矢量的作用时间
图5 空间矢量的关系图假设
 位于Ⅲ区,且与 轴夹角为30°,则可知:
位于Ⅲ区,且与 轴夹角为30°,则可知:
 (11)
(11)
 (12)
(12)
同理可以算出Ⅰ扇区:
 (13)
(13)
令 X= Y=
Y= Z=
Z= (14)
(14)
则可以通过 所处的扇区建立一个二维时间函数表(见表2),对于不同的扇区
所处的扇区建立一个二维时间函数表(见表2),对于不同的扇区 、
、 ,取不同值。
,取不同值。
表2 、
、 赋值表
赋值表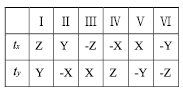
 、
、 赋值之后,还要对其进行饱和判断。随着参考电压的增加,输出电压的基电压也线性增加,T逐渐减小,但应满足
赋值之后,还要对其进行饱和判断。随着参考电压的增加,输出电压的基电压也线性增加,T逐渐减小,但应满足 及
及
若 +
+ >T,则
>T,则
 、
、 (15)
(15)
3.3 空间矢量的合成
计算出 、
、 后,可以根据扇区号,计算出各扇区内空间矢量切换点
后,可以根据扇区号,计算出各扇区内空间矢量切换点  、
、 、
、
定义三个脉冲占空比参量:
 、
、 、
、
 为最大宽度脉冲前沿切换点,
为最大宽度脉冲前沿切换点, 次宽脉冲的前沿切换点、
次宽脉冲的前沿切换点、 最小宽度脉冲的前沿切换点。从图4各个扇区内空间矢量示意图,可以得出各扇区内
最小宽度脉冲的前沿切换点。从图4各个扇区内空间矢量示意图,可以得出各扇区内 、
、 、
、 的赋值见表3。
的赋值见表3。
表3 三相脉冲的前沿切换点Tcm1、Tcm2、Tcm3赋值表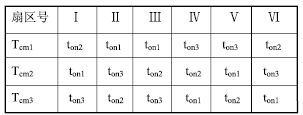
上述的SVPWM调制逼近控制算法可以总结为:
(1)根据输入的参考电压、,计算出空间电压矢量所处的扇区;
(2)计算两个有效矢量和零矢量的作用时间 、
、 、
、 3)
3)
(3)计算三角波调制后产生的三相PWM脉冲前沿延迟时间 、
、 、
、 ;
;
(4)根据扇区号选用各相的空间矢量切换点 、
、 、
、 ,从而输出三相SVPWM脉冲控制信号。
,从而输出三相SVPWM脉冲控制信号。
4 结论
交流电机的变频控制目前是大势所趋,变频控制方法当前最为流行和高效的是空间矢量控制和直接转矩控制,前者是模仿直流电机的控制方法,采用数学运算的方法依据异步电动机的动态模型,对电机的转矩电流分量和励磁分量分别进行控制而达到控制异步电动机转矩的目的;后者不是通过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,而是通过在定子坐标系下直接计算与控制电动机的磁链和转矩进而对转矩实现控制的,可获得转矩的高动态性能,本文讨论的方法虽然是利用矢量分析方法,但是以使电动机获得接近理想的圆形旋转磁链为目的,可使电动机获得近似纯粹交流输入的优良性能。参考文献
[1] 张燕宾. 变频器应用教程[M]. 机械工业出版社, 2007.
[2] 李善田. 三电平逆变器矢量控制合成方法探讨[J]. 自动化博览, 2008(10).
[3] 李华德,杨立永. 交流电动机矢量控制变压变频调速系统(七)——第七讲 异步电动机矢量控制系统[J]. 变频器世界, 2007,(5).
[4] 张燕宾. SPWM变频调速应用技术[M]. 机械工业出版社, 2005.

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号