



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 MLX90316在无刷直流电动机控制中的应用 技术领域 工业安全 行业 电子制造 简介 在介绍MLX90316内部结构以及其输出模式的基础上,给出了以dsPIC30F6010为CPU、以MLX90316为位置反馈的无刷直流电动机控制器的结构。详细介绍了基于SPI输出模式的MLX90316与dsPIC30F6010的连接方法,给出了在无刷直流电动机控制器中基于MLX90316的速度检测策略。试验结果证实了MLX90316能提高无刷直流电动机的控制性能。 内容 引 言
MLX903 16是一种线性霍尔芯片。它采用了平面霍尔传感技术的单片集成传感芯片。传统的平面霍尔技术仅仅可以测量垂直于Ic表面的磁通密度,而Triaxis霍尔技术也可以检测平行于Ic表面的磁通密度。MLX90316可以用来测量与芯片表面共面的磁通密度,可以得到从0度到360度的旋转位置值,通过多种模式输出准确度很高的线性绝对位置信号,并且成本低廉,安装简便[1-2]。将MLX90316应用于无刷直流电动机控制系统中可大大提高电动机的调速范围,降低采用霍尔元件的无刷直流电动机控制系统中低速转矩的波动,改善控制性能。
1、MLX90316结构
图1是MLX90316内部的结构框图。芯片前端是采用Triaxis霍尔技术的传感器。由霍尔传感器得到的二路正交的模拟信号经过放大处理后,经过14位微分型A/D转换器进入芯片微处理器(DSP),再经过16位DSP处理之后的数字信号分3路输出。MLX90316输出具有12位角度分辨率,10位角度精度,并且在一定程度上可以避免外围温度变化对输出精度的影响。MLX90316具有3种输出:由12位D/A转换为模拟量输出;频率为100 Hz一1 000 Hz的PWM输出;数字模式下利用串行通信协议输出(SPI)。
SPI(Serial Protocol Interface)总线接口是一种同步串行外设接口。这是一个4根信号线的串行接口协议,包括主、从两种模式。这4根信号线分别是:时钟线(SCK)、数据输入线(MISO)、数据输出线(MOSI)和从设备使能线(/ss)。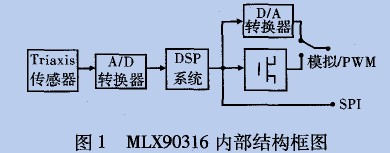
图2是数据传输结构图。该图详细描述了MLX90316的SPI通信过程。即主控端先输出一个0xAA以及一个OxFF作为通信起始信号,然后接着输出8个OxFF,而从端会同时输出2个OxFF、4个字节的角度信号以及4个OxFF,从而完成一次数据通讯。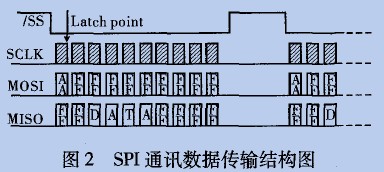
在无刷直流电动机控制中,当电动机转子在360。附近的一个很小区间内时,模拟量输出会随机产生一个电压值,会导致电动机位置及速度检测错误。另外,根据MLX90316内部结构框图,串行通信的输出信号直接来自于MLX90316的内部DSP输出,SPI输出模式更稳定,误差更小,并且具有更高的抗干扰能力。所以MLX90316的SPI输出模式更适用于电动机控制系统中。在无刷直流电动机控制器的设计中,本文选择了MLX90316的SPI输出模式。
2、控制器结构
无刷直流电动机控制器的总体结构如图3所示。运动控制专用DSP芯片dsPIC30F6010构成了控制器的核心控制单元[2-3]。控制量由外部端子及模拟量或者RS485键盘或者PC机通过Modbus协议给出;电动机转子位置由MLX90316获得;MLX903 16的SPI输出信号直接与dsPIC30F6010的SPI模块相连;PWM驱动信号通过电动机控制MCPWM模块产生;故障信号的检测由外部电路产生,并送给dsPIC30F6010的I/O口。
逆变电路采用IPM智能集成模块。它不仅把功率开关管和门极驱动电路集成在一起,而且还包含了过压、过流和过热等故障检测电路。控制器采用PM20CSJ060模块。该模块为6只IGBT管封装模块,额定电压为600 V,额定电流为20 A,开关频率可达20 kHz。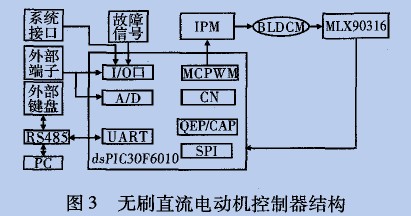
由于系统仅需要从MLX903 16芯片获得位置信号,属于单向通信,因此为了进一步节省其引脚及精简接线,MLX90316的SPI通信模式仅需3根线接入无刷电机控制系统中。dsPIC30F6010与MLX90316的时钟线(SCK)和从设备使能线(/SS)直接相连,而dsPIC30F6010的SDI1和SD01这两个引脚则通过一个信号处理电路接至MLX90316引脚MISO/MOSI。该处理电路如图4所示。
3、基于MLX90316的速度检测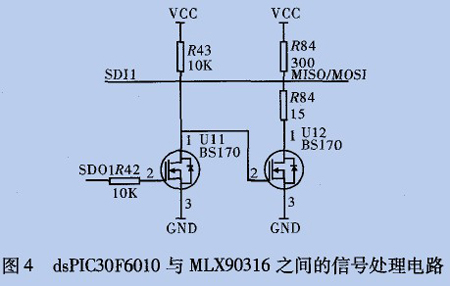
根据MLX903 16芯片的通讯要求,本应用采用了dsPIc30F6010芯片为主控端、MLX90316芯片为从端的控制方式。通信所需的同步时钟信号由主控端产生,并且数据帧同步信号/SS也通过将主控端的I/O 口输出拉低来实现。这样,在主控端dsPIC3OF6010芯片上便可以完全控制位置信号输入的时间以及信号的传输频率。
在高速模式下,MLX90316对SPI通信的要求主要包括以下几个方面:同步时钟周期不小于2.3 μs;每个传输的字节数据之问的间隔不小于12.5 μs;数据帧同步信号/ss的无效时问不小于300 μs;通信起始字节数据与后面的位置信号数据之问的时间间隔不小于15μs。这些要求可通过合理设定时钟周期和定时器溢出中断延时实现。取速度环周期为1 ms,在每个速度环一次发送0xAA和9个OxFF,同时通过查询相应状态位的方式将同步传输的10个字节的数据信号存人数组。
当所有接收数据都读取到数组以后,再对该数组的数据进行校验。在MLX90316的SPI通讯的数据格式中,第3~6个字节的数据为位置信号。其中,前两个字节分别是位置信号的高字节和低字节;而后两个字节则是前两个位置信号数据的取反值,用来校验数据的正确性。
如果前两个字节与后两个字节的取反值相同,则可确定SPI通讯过程中没有出现任何问题,但是MLX90316芯片输出的信号是否为有效信号,其角度检测是否出现错误这个问题则需要进一步验证。由于SPI输出模式的角度信号是14位的二进制数,所以该芯片的输出信号最低2位是数据状态值,即当最低2位的值为1时表示高14位的角度信号正确,而当最低2位的值为2时则说明MLX90316在位置检测时出现了错误,具体的错误来源可以根据高14位的值查相应的错误表得到。
如果在以上通信过程中出错或者是传输的数据显示MLX90316检测出错,则应当立即封锁PWM信号,并点亮错误指示灯,同时显示错误信息。
如果获得的角度信号正确,则可将此次的角度数据右移2位后减去前次的值以获得1 ms内位置信号的差SPI—AngleDif,再根据下式计算获得电动机转速:
4、试验结果及结论
在实验中采用的无刷直流电动机主要参数为:极对数4,额定转速为2 000 r/min,额定电流0.55 A,额定功率180 W。
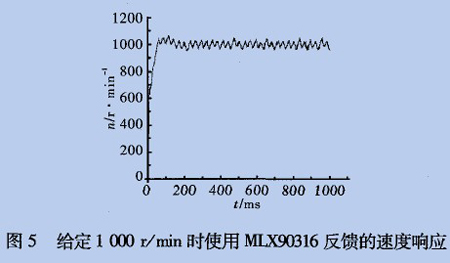
图5和图6为电动机采用MLX90316作为反馈,转速给定分别为1 000 r/rain和100 r/rain时的速度响应波形。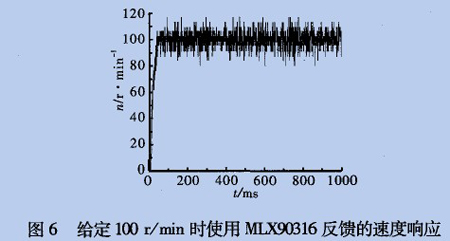
图7为电动机采用霍尔元件作为反馈、转速给定分别为1 000 r/min时的速度响应波形。当转速为100 r/min的低速时,速度环周期较大,测速误差也较大,在实际应用中无法实现低速控制。
从试验结果可以看出,在无刷直流电动机控制器中,MLX90316能克服霍尔元件低速性能差的缺点,提高电动机速度控制范围和精度,并且具有价格优势。MLX90316的SPI输出方式在应用中的主要问题是存在一定传输延时,影响控制精度,特别是在中高速表现得比较明显,这是下一步研究工作中需要解决的主要问题。

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号