



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 基于自动仓储技术的自动导向小车(AGV)的研究 技术领域 工控机 行业 汽车 简介 AGV是一种无人驾驶的激光导引运输车,A G V小车系统涉及机械、电子、光学、计算机等多个领域,广泛应用于自动化现代物流系统中。本文重点描述了以 44B0XAGV为核心的AGV控制系统的软硬件设计以及AGV小车与计算机的通讯协议。在已经投入使用中的AGV小车的良好性能证明了其控制方案的合理性和先进性。 内容 
沈治 (1977-)
男,常州人,讲师,江苏大学在读硕士,主要研究领域为控制理论及自动化控制工程。
摘要:AGV是一种无人驾驶的激光导引运输车,A G V小车系统涉及机械、电子、光学、计算机等多个领域,广泛应用于自动化现代物流系统中。本文重点描述了以 44B0XAGV为核心的AGV控制系统的软硬件设计以及AGV小车与计算机的通讯协议。在已经投入使用中的AGV小车的良好性能证明了其控制方案的合理性和先进性。
关键词:现代物流;自动导引;通讯
Abstract: With the rise of modern logistics and the development of automatic storage
technology, the automatic guided vehicles (AGV) are applied more and more. The paper
describes the front control function, characteristics in the system of AGV, and the
solution to some problems in AGV. At the same time, the paper describes the hardware
and software design in the control system which considers 44BOXAGV as a core, as well
as the communication protocol between the AGV and control computer. Now the AGV have
been widely put into use, and had good performance, which proves the control function
reasonable and advanced.
Key words: Modern Logistics; Automatic Guide; Communication
自动导引小车AGV(Automated Guided Vehicle)是一种自动化物料搬运设备,它具有自动化程度高、应用灵活、安全可靠、无人操作、施工简单及维修方便等诸多优点,因而广泛应用于汽车制造业、烟草行业、工程机械行业、机场等物资运输场所。AGV同时也广泛应用于柔性生产系统(FMS)、柔性搬运系统和自动化仓库中。AGV是现代物流系统的关键设备,它对于提高生产自动化程度和提高生产效率有着重要意义。
1 AGV系统构成
自动导向车系统(以下简称AGVS)是无人控制的自动化系统,主要由自动导车(以下简称AGV)、地面管理系统(VSM)导引系统、地址编码系统、通读系统、停车站、充电站和周边设备等基本单元组成。其中AGV是自动导向车系统的主要部分之一。AGV的优点是:能实现柔性运输、使用灵活、运输效率高、节能、系统工作可靠、无公害可以改善工作环境。
2 AGV小车控制系统概述
AGV控制系统是AGV的直接控制中枢,它将电机系统、传感器信号处理、驱动器控制、AGV的定位算法、电子地图及无线通讯等功能整合在一起。其完成的主要功能是通过无线通讯系统接收主控机或AGV车载控制机或AGV操作面板上操作按钮下达的任务完成AGV运动方向和运动速度的控制,以及AGV运动过程中障碍物的探测,安全报警及状态指示,同时通过无线通讯系统向主控机报告AGV自身的状态(如AGV的目前位置、当前工作状态、当前速度及方向等)。
2.1 AGV小车控制系统硬件框图
AGV小车控制系统采用三星公司ARM7内核芯片 44B0X来实现核心控制,附带各种外围扩展模块,实现高速实时的对小车控制,与计算机控制软件通信。
S3C44B0X提供了丰富的内部器件,包括:8K字节的CACHE,内部SRAM,LCD控制器,自动握手的两通道UART,4通道DMA,代用PWM功能的5通道定时器,丰富的I/O端口,RTC,8通道10位ADC,IIS,IIC,同步SIO接口等。
芯片内部结构如图1所示:
图1 芯片内部结构图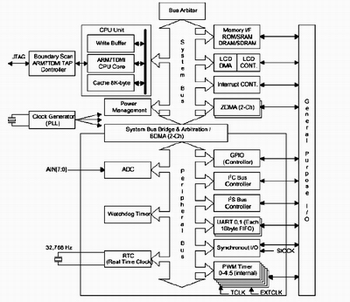
本控制系统采用S3C44B0X作为核心处理的CPU,并且在板上带了2M字节的FLASH,8字节的SDRAM构成最小系统。带有10/100M自适应网卡芯片,USB接口芯片,IIC存储芯片构成完整的应用系统。
为了更适用于AGV小车控制系统领域,本控制系统除了核心控制板之外,还带有一块LCD,键盘扩展控制板。LCD为松下256色彩屏,8寸640×480象素,更直观的将小车状态实时表现;20个键组成的键盘阵列能让操作者更方便的输入各种配置信息和路径信息。扩展板上带有丰富的状态表示发光管,所有发光管可根据用户的要求编程,除了已经应用于当前小车的A/D,D/A,还留有足够的备用A/D,D/A接口,方便用户自己扩展功能。
小车控制系统硬件结构图如图2如下:
图2 硬件结构框图
2.2 小车控制软件介绍
小车控制软件主要功能为小车配置,小车路径输入,小车行走状态表示等。小车配置能配置小车的各种参数,包括小车地址,小车各档速度,小车控制方式等,并且能预览小车行走地图,减少错误的路径信息。小车行走状态图能显示当前小车的所有状态,比如地址,控制方式,运行方向,障碍信息,当前路径的ID号,当前遵循的导引线号,停车倒计时等信息。小车路径表能在小车上输入或者显示计算机传送的路径信息,共可预设27条路径信息.其主要流程图如图3所示。
图3 车载机控制软件流程图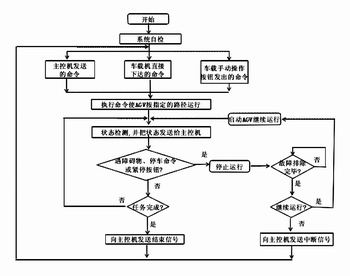
2.3 AGV小车计算机通讯协议
在无线通信的设计中,笔者制定了简单有效的通信协议来进行通信,具体实现方法如下:
通信方式:异步半双工,1位起始位+8位数据位+1位停止位,无奇偶位,无流控;
波特率:9600 bps;
协议格式:协议头为AAH + BBH ;
小车地址:00H-07H,由于本系统只有一台小车,所以小车地址默认为00H。
功能号:01H—计算机轮讯小车是否在线;
02H—小车应答计算机的轮讯;
03H—计算机发送路径信息;
04H—小车应答路径信息,接收成功并请求下条路径;
05H—计算机要求小车开始运行;
06H—小车应答启动指令,开始运行 ;
07H—小车完成当前路径;
08H—小车完成当前路径表内所有路径,到达永久停车站
09H—小车被人为中断执行路径,非正常停车。
协议尾: 0DH + 0AH;
具体格式如下:AAH + BBH + 小车地址 + 功能号 + 0DH + 0AH。
(1)计算机轮讯小车是否在线:
AAH + BBH + 00H + 01H + 0DH + 0AH,
(2)小车应答计算机的轮讯:
AAH + BBH + 00H + 02H + 0DH + 0AH,
(3)计算机发送路径信息:
AAH + BBH + 00H + 03H + 路径编号 + 导引线号 + 小车速度 + 小车方向 + 目的地址卡号 + 停车时间分 + 停车时间秒 + 滚筒阀动作 + 0DH + 0AH,
路径编号从 0-27,最大只能输入28条路径来组成完成的路径表;
导引线号从 0-2,一共只有3条导引线,小车总是在三条线路上不断切换,实现各种行走方向;
小车速度从 0-4,分别代表一个速度档位,0为静止,4位最高速;
小车方向从0-1,0为正向前进,1为反向前进;
目的地址卡号:小车进行路径切换是通过读取地面上的RF射频卡来实现,地址卡号为射频卡的编号。
停车时间分从0-59 代表0分钟-59分钟;
停车时间秒从0-59 代表 0秒钟-59秒钟;
两者结合,能实现停车 59分59秒,当停车时间分和停车时间秒为 88分88秒,代表小车永久停车,当前路径为整个路径表的最后一条路径。
滚筒阀动作00代表不动作,01 代表正转,02 代表反转,滚筒阀动作只能在小车临时停车时才能有效,所谓临时停车就是有时间限制的停车。
(4)小车应答路径信息,接收成功并请求下条路径:
AAH + BBH + 00H + 04H + 0DH + 0AH
(5)计算机要求小车开始运行:
AAH + BBH + 00H + 05H + 0DH + 0AH
(6)小车应答启动指令,开始运行:
AAH + BBH + 00H + 06H + 0DH + 0AH
(7)小车完成当前路径:
AAH + BBH + 00H + 07H + 0DH + 0AH
(8)小车完成当前路径表内所有路径,到达永久停车站:
AAH + BBH + 00H + 08H + 0DH + 0AH
(9)小车被人为中断执行路径,非正常停车:
AAH + BBH + 00H + 09H + 0DH + 0AH
3 结束语
AGV的研发是一项综合多学科、具有多种先进技术的创新应用项目,具有较高的实际应用价值。按照本文所述的设计与实现方法而研制的AGV满足了设计要求,达到了预期的效果,并且已成功地应用于多个现代物流实训系统中。
其他作者:朱丽霞(1977-),女,常州人,讲师,江苏大学在读硕士,主要研究领域为嵌入式系统技术。
参考文献
[1]叶菁. 磁导式AGV控制系统设计与研究[D]. 武汉: 武汉理工大学, 2006.
[2]张智勇,关宏等. AGV整体集成系统结构设计[J]. 物流技术,2004(4).
[3]储江伟,郭克友. 自动导引车辆(AGV)引导技术分析[J]. 起重运输机械. 2002,1(11).

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号