



.jpg)



当前位置:首页»企业

- 企业简介
-
乐星产电电气(上海)有限公司隶属于韩国最大的跨国集团LG集团(原名:乐喜金星集团),是韩国产业电器制造业的先驱。
- 公司类型:供应商
- 联系方式
-
- 乐星产电电气(无锡)有限公司
- 地址:上海市长宁区延安西路726号华敏翰尊国际广场12楼E-G座
- 邮编:200050
- 电话:021-52379977
- 传真:021-52377189
- 网址:http://www.lsis.com.cn
- Email:linsz@lgis.com.cn
- 联系人:
- 案例详细
-
标题 LS产电iS7变频器在起吊行业的应用 技术领域 行业 简介 内容 
作者简介:陈庆(1978-),浙江杭州人,助理工程师,本科,学士,研究方向为变频器应用与发展。
摘 要:本文对LS产电iS7变频器的特点、优势作简单描述,着重介绍了iS7系列变频器在起吊行业的应用实现。
关键词:变频器;提升;走行;PLC;磁通矢量控制Abstract:This paper describes the characters and advantages of LS frequency converter as well as its application to control hoist and riding of crane.
Key words:Frequency converter;Pre-limited;limited;PLC;Flux vector control1 引言
随着电力半导体,计算机以及变频调速技术的发展,变频器已经在电气传动控制领域得到了普通认同和广范应用。其本身具有的高动态、高性能、高品质、大容量、节能等显著特点,使其迅速取代了变极,串阻等控制方式,并在各传动行业里得到了推广和发展。由于传动应用场合不同,控制对像不同,变频器往往需要对控制I/O及其功能进行扩展。如何在提供高效安全的控制性能的同时,提供更灵活的系统搭建平台,更人性化的控制接口成为各大变频器厂商努力的方向。
LS产电于2008年推出了新一代变频器iS7系列,采用了先进的磁通矢量控制技术,具有低频转矩大,调速范围广,速度控制精度高等优点,更因为其丰富的选件,使iS7更容易在各应用中灵活使用。由于起吊行业对变频器性能要求较高,下面将重点介绍iS7在起吊行业中的普通应用实现,并以此展现iS7的灵活扩展性。
2 起吊应用与功能
起吊行业应用中通常有两种功能控制:提升和走行。有三种可能的控制方式(四段速,三位置,或模拟量),并带有预限位和限位开关。对于提升应用,为获得更好的转矩性能与安全性,应使用编码器反馈。
(1)提升控制中通常有如下几个重要要求:
·提升的同步控制。
·快速平滑启动,电机的快速预励磁和精确的抱闸控制。
·快速平滑制动和制动斩波器的控制。
(2)走行控制中应提供高性能边缘控制
使起吊车辆能快速安全进入边缘位置。考虑到可能对负载的损坏,起吊车辆在全速进入边缘位置时不会产生急拉动作。这些要求需要变频器具有低速大转矩、精确的速度控制、转矩跟随、预励磁、准确的抱闸控制算法,平滑加减速控制等高性能要求。iS7俱备了上述优点,更突出了人性化的拓展性。
3 iS7简介
作为LS产电2008年推出的新一代变频器,iS7集成了风机水泵、摆频、PID、自动顺序及用户自定义等应用宏。就起吊应用而言,iS7具有如下特点:
·除常用的开环V/F控制外,可选用带编码器的V/F控制,无传感矢量控制以及有传感矢量控制。
·永磁同步电机的无传感矢量控制。适用于采用永磁同步电机的提升领域
·采用无传感矢量控制时,速度控制范围可达1:100,0.1Hz时输出150%转矩。
·采用带速度反馈的矢量控制时,全速度区间内包括零速可达200%以上的转矩性能,速度控制范围1:1000。
·除常用的制动方式,更提供磁通制动功能。将制动单元效率最大化。
·内置RS485及MODBUS通讯
·可同时扩展通讯,I/O,及应用选件模块
·PLC选件模块,采用Master-K编程平台,用户可使用或自行设计特殊的应用。
·内置EMC及直流电抗器
4 设计方案
由于变频器主电路的通用性,本方案不对主电路进行详细叙述,主要从控制电路与功能上介绍iS7的应用实现。考虑到应用的通用性,本方案可以对前面提到的三种控制方式进行接口,并对变频器进行合理的参数设置,以满足性能要求。由于iS7已经提供了PLC选件模块,只需进行一次编程即可作为起吊通用应用宏提供给较简单的起吊系统,或作为控制系统的接口进行扩展。因此本方案是基于iS7的PLC选件模块而设计的通用起吊控制系统。
4.1 PLC选件模块及接口定义
PLC选件模块自身带6个数字输入,4个继电器输出,加上变频器本体8个数字输入,和2个继电器输出,1个开路集电极输出,总共可扩展14个数字输入和7个数字输出。根据起吊应用的要求,可以将接口如下表定义。表1端子功能描述变频器本体 多功能数字输入1 启/停 多功能数字输入2 空档 多功能数字输入3 预置速度2 多功能数字输入4 预置速度3 多功能数字输入5预置速度4多功能数字输入63位置控制多功能数字输入7模拟量控制多功能数字输入8外部故障多功能继电器输出1(常开)机械抱闸控制多功能继电器输出2(常开)故障输出模拟量输入1PLC选件模块数字输入1点动 右向/提升数字输入2限位开关 右向/提升数字输入3预限位开关 右向/提升数字输入4点动 左向/下降数字输入5限位开关 左向/下降数字输入6预限位开关 左向/下降4.2 四段速控制
段速控制是指控制台操作杆处于不同位置(速度段)时,电机转速有不同的速度要求。起吊应用中一般采用四段速度。控制接线如图1所示。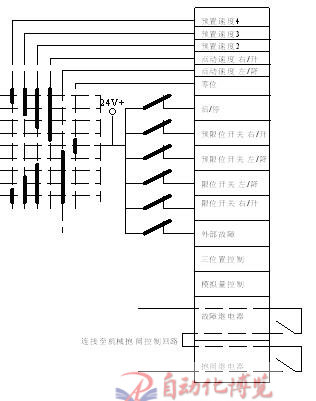
图1 四段速控制接线图4.3 三位置控制
位置控制是指控制台操作杆处于不同位置时,对电机转速的处理不同。起吊应用中一般采用三位置控制:空档、速度保持、加速。控制接线如图2所示。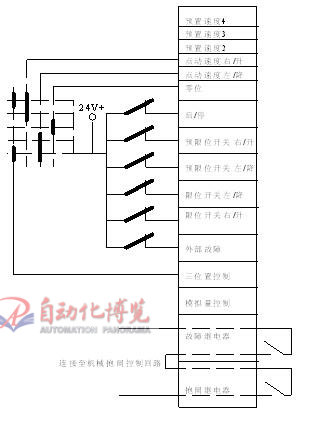
图2 三位置控制接线图4.4 模拟量控制
模拟量控制是指控制台操作杆采用电压模拟信号进行转速控制。控制接线如图3所示。
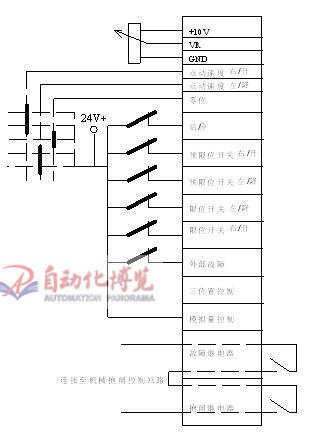
图3 模拟量控制接线图4.5 编码器反馈
走行控制时,可以采用无传感矢量控制,在一台变频器控制多台走行电机时,应采用V/F控制。但提升控制时,为得到更好的转矩和转速特性及安全性,应采用有传感矢量控制,此时可以采用iS7的编码器选件模块。此模块提供三种电源(5/12/15V),线性和开路集电极接口,最大频率至200kHz。使用时只需根据采用的编码器类型根据说明书接线与设置参数即可,这里不再进行详细描述。
4.6 机械抱闸
机械抱闸主要是实现从运行到停止或反之过程中的平滑过渡。机械抱闸通过选择变频器本机上的继电器1功能“抱闸”来实现。在非矢量控制的情况下,iS7抱闸控制顺序如下:
停机状态下接受到运行指令后,变频器在输出频率和电流满足释放频率和释放电流时,通过抱闸继电器输出抱闸释放信号,并保持释放频率输出,延迟释放时间后开始加速。运行状态下接收到停止指令后,开始减速,达到抱闸频率时输出抱闸信号并保持抱闸频率输出,延迟抱闸时间后停止输出。
在矢量控制情况下,抱闸控制顺序如下:
停止状态下接受到运行指令后开始预励磁,预励磁时间结束后输出抱闸释放信号,并延迟抱闸释放时间后开始加速。运行状态下接收到停止信号后,开始减速至零速时输出抱闸信号。延迟抱闸时间后停止输出。
根据应用情况,合理设置抱闸控制参数,变频器本体可以很好的完成抱闸操作。需要注意的是,为快速响应故障情况,可以将故障继电器与抱闸继电器串联在抱闸控制回路中。
4.7 (预)限位开关
通过(预)限位开关发送的信号,变频器可以平滑安全的在边缘点停车。预限位开关应使用常闭触点,并在到达相应位置时打开。
如果仅预限位开关激活,变频器控制电机以点动转速或预置转速1向相对应的限位开关方向运行,或以任意转速向反方向运行。
限位开关激活时,变频器停止并进行抱闸动作或仅允许以任意转速向反方向运行。
4.8 快速反向
提升过程时,控制器若切换至反向,变频器将以第二减速时间控制电机快速减速和反向,并在到达零速后以第二加速时间反向加速至点动速度。然后根据控制器的位置加速至相应转速。4.9 主要程序流程图
根据上述控制功能要求,PLC主要控制程序流程如图4所示。
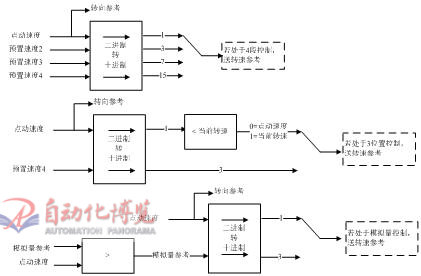
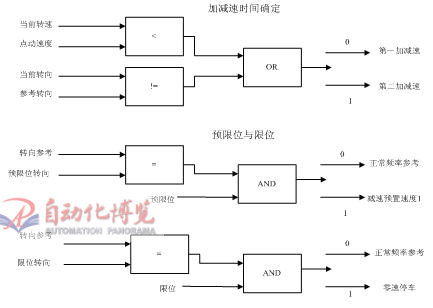
图4 PLC主要控制程序流程图5 总结
实际应用中,iS7以及内置起吊应用宏的PLC模块很好的实现了对提升和走行的控制。但本方案的程序中未对提升过程中会出现的掉落危险加以考虑,掉落危险以外部故障方式送往变频器作为故障处理。但为安全考虑,此危险的处理不应依靠变频器本身,而应采用独立的处理单元,如PLC模块。在改进方案里,起吊应用宏将增加这一功能,主要通过比较当前转速参考的方向和大小与编码器实测的转速方向与大小决定是否处于掉落危险,并输出掉落信号,此信号与故障、抱闸触点串联作为抱闸控制回路的一部份。另外使用预励磁、直流启动、磁通制动功能时,可以使电机快速响应运行指令和快速平滑的停车,但应用中发现此时电机温升较高,需加装独立风扇对电机散热,考虑到安全性可以将电机热阻信号连接至iS7作为故障保护。
总体上来看,iS7在提升和走行控制上的性能及功能表现较突出,其PLC模块选件使iS7不仅在I/O口上,更在应用功能上可以实现扩展,编码器模块提供的丰富接口也能满足绝大多数不同类型的编码器需要。本文以起吊行业为例,给出了iS7可扩展的起吊应用通用宏方案。事实上由于PLC模块的灵活性,用户或设计者可以针对不同的应用情况,开发出更丰富的专用或通用应用宏,组建成本更低的系统。
——转自《自动化博览》

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号