



.jpg)



当前位置:首页»企业

- 企业简介
-
工业自动化与驱动技术集团(IA&DT)是西门子股份公司中最大的集团之一,是西门子工业领域的重要组成部分。IA&DT是西门子在华业务的支柱,在制造自动化、过程自动化及楼宇电气安装领域提供创新、可信赖和高质量的产品、系统、应用和服务。我们致力于服务中国市场和客户,并且有信心通过我们最大的努力为客户提供最好的服务。
- 公司类型:供应商
- 联系方式
-
- 全新西门子工业业务领域中文网站发布
- 地址:北京市朝阳区望京中环南路7号
- 邮编:100102
- 电话:010-64763750
- 传真:010-64764915
- 网址:http://www.ad.siemens.com.cn/
- Email:boru.zhu@siemens.com
- 联系人:
- 案例详细
-
标题 弱磁控制在桥式起重机上的应用 技术领域 PLC&PAC 行业 简介 内容 摘 要:在起重机行业中,为了提高工作效率,起升机构可以高于额定速度运行,这样可以提高起重机性能,缩短工作时间,该功能通过弱磁控制实现。
关键词:西门子,起重机, 弱磁控制, PLC, Masterdrive
Abstract: For close loop controlled drives, for increasing the performance and moving more loads in less time, an attempt is made to increase the speed above the rated speed. This is used, for example, for hoisting gear of cranes at partial loads. This function is implemented using the loaddependent fieldweakening.
Key Words: Siemens, Crane,Fieldweakening,PLC, Masterdrive1 引言
我们知道,电流经过电机绕组产生磁场而推动电机转子转动,在转子转动的过程中其变化的磁密又在定子绕组中产生反电动势,转速越高反电动势越强,当反电动势增强到与输入电压相比拟时,电机绕组就无法获得足够的电流来克服阻转力矩,转速的增长也就停滞了,这个就是电机能获得的额定转速。
可以通过提高电机输入电压和电流的方式,来使电机获得更高的转速。输入电压越高,电机转速越高,电机电压与转速是正比关系,此时为恒力矩调速,当输入电压达到最大值不允许再升高时,此时如果要再升速,就需要弱磁控制,此时为恒功率调速,即,功率 = 转速 * 力矩,转速升高,则力矩下降。
对于起重机的起升机构,只有当负载小于额定负载的情况下,才能进入弱磁状态,电机才能以大于额定转速工作,电机进入弱磁工作时,可用输出力矩减小。2 弱磁理论基础
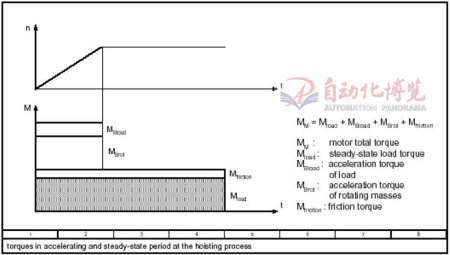
静态负载转矩主要由:负载力矩,负载加速力矩,转动惯量加速力矩和摩擦力矩几部分组成,即:MM = MLoad + MBLoad + MBrot + MfrictionMM = 总的电机力矩
MLoad = 负载力矩
MBLoad = 负载加速力矩
MBrot = 转动惯量加速力矩
Mfriction = 摩擦力矩MM = MLoad + MLoad* kBload*dn/dt + kBrot*dn/dt + MfrictionkBload 和kBrot 是通过测量决定的比例系数,同样的Mfriction 也必须通过测量来决定。MM = MLoad* (1 + kBload*dn/dt) + kBrot*dn/dt + MfrictionMLoad = MM - Mfriction - kBrot*dn/dt / (1 + kBload*dn/dt)此方程式只适用于上升方向加速时的正向dn/dt。MLoad ~ ILoad = IM - Ifriction - kBrot*dn/dt / (1 + kBload*dn/dt)因此,为了决定负载的大小,dn/dt和电机电流IM的测量是必须的。
测量的过程固定在设备正常速度的40% ~ 90%之间,用以计算弱磁的最大速度。
 3 在PLC中的弱磁控制程序在PLC程序中使用功能块FB1605来测量负载启动时的加速电流。
3 在PLC中的弱磁控制程序在PLC程序中使用功能块FB1605来测量负载启动时的加速电流。
当测量结束后,负载经过计算通过DB200.DBD72显示出来。
如果采样区间为正常速度的40%-90%,则采样时间为约750ms,在这750ms期间,大约进行20-30次测量。
测量期间,所有的dn/dt值和电流实际值都被相加,测量结束后,除以测量次数得出平均值。至少需要进行20次测量,否则,计算值无效。
 参数说明名 称格 式说 明CurrentReal从逆变器传送过来的实际电流/力矩,必须是电机额定电流的百分比 %AccelerationReal加速dn/dt,以百分比 % 显示,在正常的加速时间时,等于100%,如果加速时间加倍,则此值等于50%SpeedReal电机实际速度,相对于最大速度以百分比 %显示,电机最大速度即弱磁速度 = 100%Speed_StartReal采样启动区间,以百分比 % 显示,例如:Nmax = 1800 rpm = 100%Nnom = 900 rpm = 50%起始采样 = 40% * Nnom = 20%结束采样 = 90% * Nnom = 45%Speed_StopReal采样结束区间,以百分比 % 显示,例如:Nmax = 1800 rpm = 100%Nnom = 900 rpm = 50%起始采样 = 40% * Nnom = 20%结束采样 = 90% * Nnom = 45%Adap_Acc_LoadReal加速负载的调节系数,相对于额定负载以百分比 % 显示经验值:5% - 10%Adap_Acc_RotReal转动惯量的调节系数,相对于额定负载以百分比 % 显示经验值:20% - 40%Adap_FricReal摩擦力的调节系数,相对于额定负载以百分比 % 显示经验值:1% - 3%Adap_EfficReal上升与下降时效率偏差的调节系数,相对于额定负载以百分比 % 显示经验值:110% - 120%Adap_KReal计算负载用的乘法系数,公式为:负载 (吨) = 测量值 * Adap_K + Adap_OffsetAdap_OffsetReal计算负载用的偏差系数,公式为:负载 (吨) = 测量值 * Adap_K + Adap_OffsetReset_StorageBool该输入信号用于复位上一次测量值,当信号为“0”时,新的测量不能进行并且上一次的测量值被保存。该功能主要用于负载下降时,由于在上升时已经完成了负载的测量,因此下降时没有必要再次进行测量。只有当该输入信号被复位时,才能进行新的测量,例如:吊具开闭锁信号。AdjustmentBool该位用于释放计算电流,当负载上升时,计算电流必须被确定,此电流可以通过DBD78读得(实数格式)。LoadReal计算负载 (吨)Load_ValidBool“1” = 输出端的计算负载是有效的
参数说明名 称格 式说 明CurrentReal从逆变器传送过来的实际电流/力矩,必须是电机额定电流的百分比 %AccelerationReal加速dn/dt,以百分比 % 显示,在正常的加速时间时,等于100%,如果加速时间加倍,则此值等于50%SpeedReal电机实际速度,相对于最大速度以百分比 %显示,电机最大速度即弱磁速度 = 100%Speed_StartReal采样启动区间,以百分比 % 显示,例如:Nmax = 1800 rpm = 100%Nnom = 900 rpm = 50%起始采样 = 40% * Nnom = 20%结束采样 = 90% * Nnom = 45%Speed_StopReal采样结束区间,以百分比 % 显示,例如:Nmax = 1800 rpm = 100%Nnom = 900 rpm = 50%起始采样 = 40% * Nnom = 20%结束采样 = 90% * Nnom = 45%Adap_Acc_LoadReal加速负载的调节系数,相对于额定负载以百分比 % 显示经验值:5% - 10%Adap_Acc_RotReal转动惯量的调节系数,相对于额定负载以百分比 % 显示经验值:20% - 40%Adap_FricReal摩擦力的调节系数,相对于额定负载以百分比 % 显示经验值:1% - 3%Adap_EfficReal上升与下降时效率偏差的调节系数,相对于额定负载以百分比 % 显示经验值:110% - 120%Adap_KReal计算负载用的乘法系数,公式为:负载 (吨) = 测量值 * Adap_K + Adap_OffsetAdap_OffsetReal计算负载用的偏差系数,公式为:负载 (吨) = 测量值 * Adap_K + Adap_OffsetReset_StorageBool该输入信号用于复位上一次测量值,当信号为“0”时,新的测量不能进行并且上一次的测量值被保存。该功能主要用于负载下降时,由于在上升时已经完成了负载的测量,因此下降时没有必要再次进行测量。只有当该输入信号被复位时,才能进行新的测量,例如:吊具开闭锁信号。AdjustmentBool该位用于释放计算电流,当负载上升时,计算电流必须被确定,此电流可以通过DBD78读得(实数格式)。LoadReal计算负载 (吨)Load_ValidBool“1” = 输出端的计算负载是有效的
4 速度给定功能块FC1630
 此FC1630功能块,可以根据计算的电流实际值给出相应的速度。
此FC1630功能块,可以根据计算的电流实际值给出相应的速度。
首先,设定好Y1,Y7和X7的值,然后计算出X1的值,指定中间值X2到X6,最后再计算出Y2到Y6的值。
比如:X1 = X7/Y1*Y7 = 50% Y1 = 最大速度 = 100%X2 = 55% Y2 = 91%X3 = 60% Y3 = 83%X4 = 70% Y4 = 71%X5 = 80% Y5 = 62%X6 = 90% Y6 = 56%X7 = 100% = 额定电流 Y7 = 额定速度 如:50%计算公式:Yx = X7*Y7/Xx如:Y2 = X7*Y7/X2 = 100*50/55 = 91弱磁曲线例子:(恒功率)

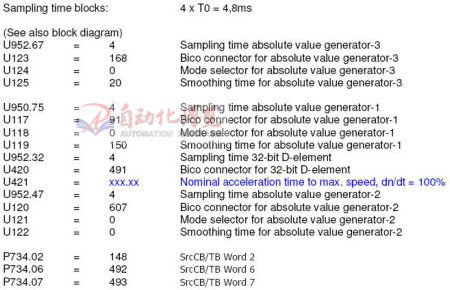
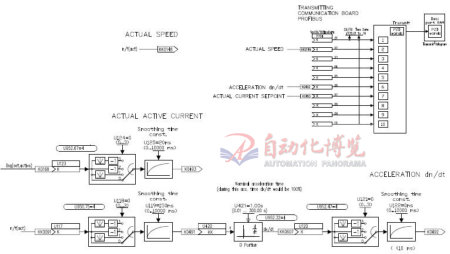
5 驱动参数设置
 6 总结通过对PLC及驱动参数的设置,实现弱磁功能,起升机构可以高于额定速度运行,提高了设备的工作效率,提升了起重机性能,缩短了工作时间,因此弱磁功能被广泛的应用于各种场合。
6 总结通过对PLC及驱动参数的设置,实现弱磁功能,起升机构可以高于额定速度运行,提高了设备的工作效率,提升了起重机性能,缩短了工作时间,因此弱磁功能被广泛的应用于各种场合。

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号