



.jpg)



当前位置:首页»企业

- 企业简介
-
霍尼韦尔过程控制部隶属于霍尼韦尔自动化与控制集团, 作为全球领先的产品和解决方案供应商,霍尼韦尔过程控制部帮助全球家庭、楼宇建筑以及工业企业提升效率以及利润率、协助符合法律规范、确保安全并创建舒适的环境。
- 公司类型:供应商
- 联系方式
-
- 霍尼韦尔中国公司
- 地址:北京市朝阳区酒仙桥路14号兆维工业园甲1号
- 邮编:
- 电话:010-00000000
- 传真:010-64103414
- 网址:http://www.honeywellprocess.com
- Email:info.HPSChina@honeywell.com
- 联系人:市场部
- 案例详细
-
标题 Honywell PKS在空压机自动控制系统的设计与实现 技术领域 自动化软件 行业 简介 简述了空分装置中空气压缩机的重要性及控制要求,详细介绍了Honywell的PKS控制系统在空压机控制系统的设计以及自动加载的设计和实现。 内容 前言
原料空气压缩机系统对于整个空分装置而言,空气压缩机的稳定运行直接影响到所有的后续系统的稳定性,目前空压机的控制方式有机器厂家自带PLC控制器,或在DCS上实现控制,而后者被越来越多的应用,空压机控制系统的设计在整个仪控设计中同样有着极为重要的作用,空压机系统自动化水平的高低直接影响了整套空分装置的自动化水平。
河北前钢21000Nm3/h空分装置主体设备由杭氧生产,空压机采用的是美国Copper 公司3MSG25/ 10型三级压缩的压缩机, 配套的电机是美国西屋公司10000kW电机, DCS控制系统采用的是美国HONEYWELL公司的PKS( R301版本)系统,通过PKS系统的控制组态软件Control Build 可以创建控制模块(CMs),顺序控制模块(SCMs),及硬件设备,通过执行下位程序的编写和运行监视,实现各种控制策略的组态;通过流程图组态软件HMIweb Display Build则可以实现绘制用户流程图、连接显示数据、组态数据及图形参数,并且利用强大VB代码可以实现包括动态显示在内的各种功能;而通过第三方控制系统数据库组态软件Quick Builder可以建立上位软件与下位硬件之间读取数据的接口,从而在操作站软件上搭建监控系统平台,从而真正达到DCS系统的分散控制,集中操作、分级管理。
空压机系统控制要求
(1)恒压控制
原料空压机的作用就是满足工艺要求送出一个压力恒定的气流,为分馏塔分馏提供原料空气,所以它的最基本的控制要求就是恒压控制。
(2)防喘振控制
喘振工况是空压机系统的非正常工况,也是离心式压缩机特有的工况之一,具有破坏性。如果空压机出现喘振,则会直接损坏空压机设备,造成空分停车事故,所以必须要避免喘振现象的发生,以免造成更大的损失。
(3)故障联锁逻辑控制
在空压机正常运行时,只要有任意一个监控参数达到联锁值,为了避免损坏设备,必须将空压机停车。这也是空压机的故障联锁控制的基本要求。
(4)辅助安全控制
高压保护控制:为了防止出口压力过高,空压机的出口压力设置一个安全保护范围,使它工作在正常范围之内。
电机过载保护控制:为了防止空压机电机超负荷工作,限制入口导叶无限开大,通过电机过载保护控制器调节导叶而减小负荷。
(5)空压机自动加载和自动卸载
实现空压机的自动加载大大方便了操作人员的操作,避免了操作升压时误操作而引起空压机喘振,缩短了人工加载的加载时间,具有升压快,升压电流小,节能的特点。
通过了解以上各个控制要求,我们控制策略的设计必须合理、有效的把各个要求都在我们的控制系统中得以实现,从而对空压机的可靠运行提供重要的保障。
空压机自动控制系统设计
在先前的介绍中,我们已经了解可以通过Control Build实现控制策略的组态,而在整个空压机系统的设计中,我们通过控制模块CM、顺序控制模块SCM,将以上几个控制要求很好的结合在一起,并且各司其职。既实现了各种控制要求,又实现了自动加载、卸载,停车逻辑等保护。
空压机系统中被控对象就是两个阀门:入口导叶IGV1001,放空阀BOV1002。通过各个控制模块的组合设计,让各个控制器在该起作用的时候就接过控制权,控制阀门动作,使其工作在稳定、安全的工作区域。图1、图2分别是入口导叶IGV1001和防空阀BOV1002的控制框图。

图1 入口导叶控制
图1中,HC1001是入口导叶手操器,PIC1019B是入口导叶压力控制器,IIC1060是电流保护控制器,UNLOAD_RAMP是卸载爬坡器, IGV_RAMP是入口导叶爬坡器,CALC是一个计算模块。PIC1019B和HC1001的信号通过高选器输出,之后再与电流保护控制器的输出低选,最后通过与导叶的最小开度计算作为最终的输出信号,最后的计算公式的意义也就是保证了导叶开度在20%-100%之间调整。电流保护控制器一般有两种控制方法,一种就是与电流保护控制器信号低选,另一种就是直接减去(100-电流控制器信号),若是选择了第一种则需要对电流控制器的输出做一个跟踪,从而保证过流控制器在过流的情况下马上进行减负荷。
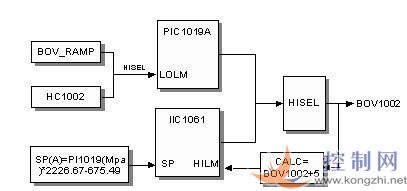
图2 放空阀控制
图2中,HC10012是放空阀手操器,PIC1019A是放空阀压力控制器,IIC1061是防喘振控制器,BOV_RAMP是放空阀爬坡器,有0-100%和100-0%两段。防喘振控制不管采用哪种方式原理都是类似的,都是根据出口压力计算出的设定值,这也就决定了防喘振控制器必须投串级控制,该计算公式则在做完喘振曲线之后通过平移计算得出,此外喘振控制器的输出需要跟踪。图中HC1002与BOV_RAMP的输出高选作为PIC1019A控制器的低限跟踪信号,同时将PIC1019A的模式置为串级,在自动加载中也正是利用这一块来实现对放空阀的自动控制,当PIC1019A的输出大于低限跟踪信号时,加载完成,放空阀处于自动控制。
自动加载简单说就是通过用程序和逻辑控制自动完成对阀门的控制达到设定压力的步骤。空分中常用的自动加载有两种:一种是入口导叶和放空阀同时动作,另一种是导叶和防空阀分时动作,保证调节的时候始终只有一个阀门在动作。显然,第一种控制方案对PID参数设置的要求更高,相当于MIMO(多输入多输出)系统,对于第二种方案,相当与两个SISO(单输入单输出)系统,参数调整相对容易些,但是必须解决好两个控制器之间转换的衔接问题,控制回路相对复杂。笔者此次项目空压机控制方式采用的是第二种控制方式,本加载控制系统由两个程序和之前介绍的控制模块组成。整个加载控制方案的程序框图见图3、图4。
在每次启动空压机之前,将程序置在运行状态,开始程序之后,程序将初始化各模块的参数,程序在等待空压机运行信号和加载信号到来之后,程序触发入口导叶爬坡器IGV_RAMP,入口导叶也将从0开始向20%爬坡,同时这个开度也将作为入口导叶的最小开度(该开度厂家确定),在程序判断导叶到达最小开度之后,选择自动加载或手动加载,同时判断放空电磁阀逻辑是否得电。若是选择手动加载,程序将执行手动加载程序,将HC1001、HC1002模式置为手动,UNLOAD_RAMP输出置为100%,BOV_RAMP输出置为0%,PIC1019A置为串级,通过操作手操器实现对空压机系统的加载,在出口压力接近PIC1019A的设定值之后,该控制器将起作用,放空阀将处于自动控制状态,到此手动加载程序完成;
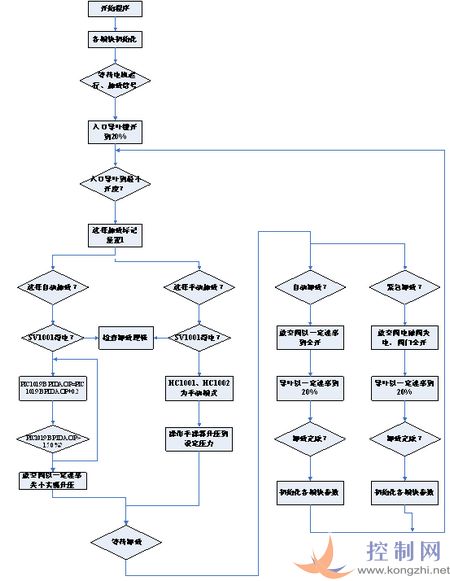
图3 空压机自动加载主程序框图
若是选择自动加载,则只要操作员按下自动加载按钮,程序开始执行自动加载程序,自动加载程序的动作将按如下步骤进行,首先继续动作入口导叶,将PIC1019B的输出按一定速率开到合适开度(接近正常工作开度),该开度可以根据实际情况可调,之后触发BOV_RAMP下降段开始提压,当PIC1019A的输出大于BOV_RAMP的输出时放空阀处于自动控制,到此,空压机自动加载程序完成。需要注意的是,IIC1060、IIC1061两个控制器只要空压机运行就分别投自动模式、串级模式,不允许修改。
上述过程中,只是把空压机达到了设定压力,没有向后续系统送气,所以在开始向后续系统送气的过程中,放空阀会继续在PIC1019A的控制下关小,当BOV的开度小于1%之后,恒压控制的任务将由PIC1019B 控制器来完成,PIC1019B的模式将变成自动模式,同时为了防止放空阀同时动作,PIC1019A的设定值将自动增加0.03MPA。PIC1019B的模式置为自动之后,操作员可以人为干预,从而防止失调现象,而该PID模式的转换,可以通过图5小程序来实现。
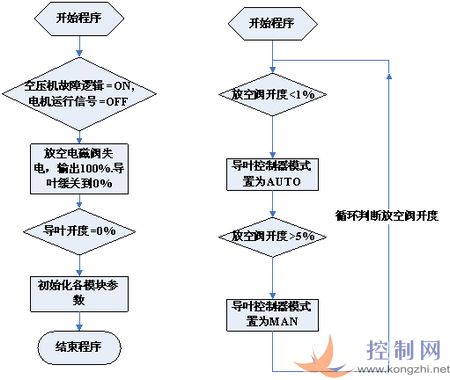
图4 空压机结束程序 图5导叶控制器模式转换程序
在加载完成之后,程序等待在卸载步,分为自动卸载和紧急卸载,自动卸载可用在计划停车时,而紧急卸载则是根据卸载逻辑来触发,后续系统故障、空压机进入安全线等都将触发程序紧急卸载,从而让空压机工作在安全状况下。卸载的结果都将是放空阀全开,入口导叶在最小位置,当故障排除之后,可以通过画面上的按钮从新来选择加载方式进行加载。
空压机加载程序由主程序和结束程序组成,且两者具有优先级,结束程序优先于主程序,这样就很好的保护了空压机,在加载的任意时间,只要有故障逻辑或则停电,空压机程序将立刻走结束程序,自动完成各参数初始化。
4、总结
通过在现场的实际应用,整个加载程序达到了预期的目的,整个加载过程快速而又平稳,图6即为在现场使用程序后的加载历史曲线图。

图3 空压机加载曲线
从图中我们可以看到在升压的过程中,快速而又平稳,在达到设定压力之后,三条曲线都很稳定,且在开始向后续系统送气之后,出口压力还是稳定在设定值处,也就达到了我们自动控制的要求,取得了比较满意的效果。

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号