



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 基于Buck变换器的全局时变滑模控制器设计 技术领域 行业 简介 为克服普通滑模变结构控制系统中系统到达滑模面之前鲁棒性差的特点,针对Buck变换器输入电压纹波干扰问题设计了一种全局时变滑模面。消除了滑模控制的趋近阶段,能够保证系统从初始时刻到终止时刻对参数摄动和干扰具有鲁棒不变性,并用仿真结果验证所用方法的有效性。 内容 (洛阳理工学院电气工程与自动化系,河南 洛阳 471023)李春娟,何 墉
(青岛软控股份有限公司,山东 青岛 266000)孙广东
李春娟(1982-)女,河南孟州人,硕士,助教,主要研究领域为鲁棒控制。
基金项目:河南省教育厅自然科学研究计划项目(编号2008B510016)
摘要:为克服普通滑模变结构控制系统中系统到达滑模面之前鲁棒性差的特点,针对Buck变换器输入电压纹波干扰问题设计了一种全局时变滑模面。消除了滑模控制的趋近阶段,能够保证系统从初始时刻到终止时刻对参数摄动和干扰具有鲁棒不变性,并用仿真结果验证所用方法的有效性。
关键词:全局时变滑模控制;Buck变换器;鲁棒性
Abstract: To solve the problem that the performance of robust was bad especially before approaching the sliding mode surface, a novel method of global time-varying sliding mode is designed for the buck converter to deal with disturbance of input voltage ripple. This method eliminates the approaching phase of sliding mode control to ensure the robust invariance of the control system with the parameter perturbations and interference from the initial point to the end point. At last the effectiveness of the methods is shown by the simulation results.
Key words: Global time-varying sliding mode control; Buck converter; Robust
1 引言
滑模控制作为一种先进的非线性变结构控制方法可以用于控制具有变结构特性的DC/DC开关变换器。DC/DC变换器采用滑模控制技术[1],控制器设计简单,系统对外界干扰和系统参数的摄动具有很好的鲁棒性,这种控制方法已得到广泛地应用,成为研究的热点。文献[2]介绍了Buck变换器的比例积分与滑模两种方法实现双闭环控制,文献[3]采用双滑模面的控制方法,文献[4]采用积分重构的方法设计控制器,但只考滤电压扰动而没有解决电源电压衰减的问题。文献[5]和文献[6]分别设计了Buck变换器和Boost变换器的反步控制器,但是都是针对负载的不确定性而设计的,没有考虑到输入电压存在波纹干扰的问题。文献[7]采用准滑模控制方法减弱滑模控制的抖动,但这是以增大系统的稳态误差为代价。文献[8]在Buck变换器中应用了平滑模反步控制,也削弱了滑模控制的抖动问题但是所给出的控制器比较复杂。鉴于普通滑模控制器仅在滑动阶段对干扰和不确定性具有不变鲁棒性,而系统在到达阶段对外界干扰和系统参数的摄动并不具有鲁棒性的特点,本文设计了Buck变换器全局时变模控制器以提高系统的鲁棒性。
2 Buck变换器的平均模型
工作在连续导电模式下的BUCK变换器可以等效成两种线性电路在开关控制下的高速切换电路,结构如图1所示。根据开关的不同状态,可以用以下非线性微分方程组来建立模型。
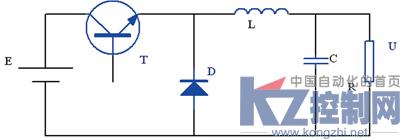
图1 Buck变换电路
若设电容电压为x1,电感电流为x2,有:
 (1)
(1)
其中u=0,代表T关断;μ=1,代表T导通。
由于开关周期T很小,所以可以认为在一个周期T内, ,
,
 可得Buck变换器的状态空间平均模型如下:
可得Buck变换器的状态空间平均模型如下:
(2)
在稳态时, ,
,
 。若
。若 ,则有:
,则有:
 ,
, (3)
(3)
其中 和
和 为理想输出电压和电感电流值。
为理想输出电压和电感电流值。
3 控制器设计
把Buck电路的平均模型如(7)式转变为第一能控制标准型,转变为如下的形式:
 (4)
(4)
其中x1和平均模型中的x1相同,均为输出电压,x2是x1的导数, ,
, 输入电压的波纹干扰。选滑模面的形式如下:
输入电压的波纹干扰。选滑模面的形式如下:
 (5)
(5)
其中参数k1,k2如式子(6)和(7)所示。
 (6)
(6)
 (7)
(7)
buck变换器的全局时变滑模控制律如下:
 (8)
(8)
 (9a)
(9a)
 (9b)
(9b)
其中 ,M是 Δ的最大绝对值,η是一个正数。选取李亚普诺夫函数如下:
,M是 Δ的最大绝对值,η是一个正数。选取李亚普诺夫函数如下:
 (10)
(10)
求式(10)的导数可得
 (11)
(11)
把控制律代入得到(11)中可以得到
 (12)
(12)
最后可以得到系统闭环方程为:
 (13)
(13)
4 仿真结果
为了验证上述滑模控制的效果,选取的Buck变换器的参数为:负载电阻R=30Ω,输入电压E=15V,电感L=20mH,电容C=68μF,控制系数选为C1=120。期望的输出电压由vd=5V跳变为vd=12V,在变换器的期望输出电压发生变化到再次稳定的过程中,笔者对输入电压施加了波纹干扰。采用上面所设计的时变全局滑模控制器,输出电压在较短的时间内就达到了期望的电压值,而且输出的电压曲线非常平滑,稳态效果很理想。
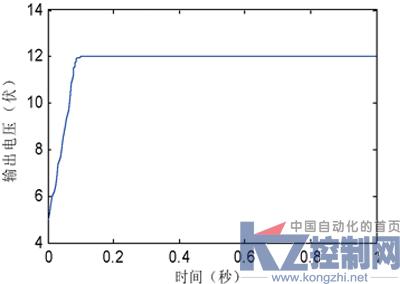
图2 系统输出电压图
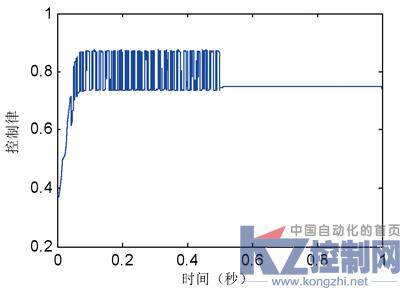
图3 系统控制律
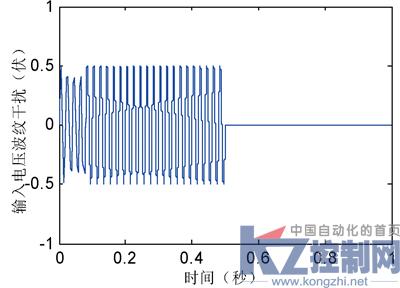
图4 输入电压干扰
5 结论
对于输入电压含有纹波干扰的Buck变换器,文中给出了一种全局滑模控制方案以消除滑模控制的到达阶段,提高了整个系统的鲁棒性。在时变滑模控制设计中,首先根据极点配置的原理选择滑模面的系数,然后再根据系统的初始状态在控制系数中附加一部分时变的调节量,使得系统的初始状态落在滑模面,当Buck变换器的期望输出电压变化时整个控制系统的变化是平滑的。这种滑模控制器使得系统在整个动态过程中具有鲁棒性。
其他作者:何墉(1980-),男,陕西宝鸡人,硕士,助教,主要研究领域为滑模控制。孙广东(1980-),男,山东青岛人,硕士,工程师,主要研究领域为滑模控制。
参考文献:
[1] 刘斌, 杜量, 许飞, 马皓.Buck型变换器滑模控制技术及其发展综述[J]. 机电工程, 2007, 24(7): 1-4.
[2] 张黎, 丘水生. 比例积分滑模Buck变换器分析与实现[J]. 电力电子技术,2005, 39(2): 26-28.
[3] 林丁笑, 郑耀林. DC-DC变换器双滑模面变结构控制[J]. 华侨大学学报,2006, 27(3): 292-295.
[4] 张黎, 丘水生. Buck变换器的积分重构滑模控制[J]. 电机控制学报, 2006,10(1): 93-96.
[5] El Fadil H, Giri F, Haloua M, Ouadi H. Nonlinear and Adaptive Control of Buck Power Converters [C].Decision and Control, 2003 Proceedings.42nd IEEE Conference, 2003.
[6] El Fadil H,Giri F. Backstepping Based Control of PWM DC-DC Boost Power Converters [J].IEEE Transactions on Power Electronics, 2007 (June):395-400.
[7] 倪雨, 许建平. 准滑模控制开关DC-DC变换器分析[J]. 中国电机工程学报, 2008, 28(21): 1-6.
[8] Li-kui YI, Jun ZHAO, Dan MA. Adaptive Backstepping Sliding Mode Nonlinear Control for Buck DC/DC Switched Power Converter[C].IEEE Trans on Control and Automation, 2007, 5-6: 1198-1201.
摘自《自动化博览》2010年第九期

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号