



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 基于FNN的板球系统轨迹控制方案 技术领域 机器视觉 行业 简介 基于视觉的板球系统是一个典型的多变量、非线性控制对象,本文针对该系统的基本位置控制和轨迹控制问题,提出了模糊多变量控制方法并结合神经网络控制方案,仿真实验结合实际系统实验均实现了其对位置控制和任意运动轨迹控制,验证了控制效果。 内容 (洛阳理工学院电气工程与自动化系,河南 洛阳 471023)赵艳花,张伟明

赵艳花(1982-)女,河南濮阳人,硕士,助教。现就职于洛阳理工学院电气工程与自动化系,主要研究方向为自动控制、机器人视觉伺服控制。
摘要:基于视觉的板球系统是一个典型的多变量、非线性控制对象,本文针对该系统的基本位置控制和轨迹控制问题,提出了模糊多变量控制方法并结合神经网络控制方案,仿真实验结合实际系统实验均实现了其对位置控制和任意运动轨迹控制,验证了控制效果。
关键词:板球系统;轨迹控制;模糊多变量控制
Abstract: Vision-based ball and plate system is a typical multi-variable nonlinear system. For the position and trace control of this system, in this paper we propose a fuzzy multi-variable control method combined neural networks.The simulation result and real system result of position and trace control shows that our scheme has good performance.
Key words: Ball and plate system; trace control; fuzzy multi-variable control
1 引言
板球系统是一个典型的多变量、非线性控制对象,它是杆球系统的扩展,板球系统如图1所示,由平板、小球、CCD摄像机、电机和相应的控制设备组成。两台电机可以分别带动平板倾斜以使小球在其上任意滚动,CCD摄像机是小球位置的检测设备。

图1 板球系统示意图
板球系统是具有两个输入、两个输出的二自由度非线性动态系统,应用直接数字控制(DDC)具有相当大的困难 。板球系统的控制问题包括:到点的滚动,以及难度较大的轨迹跟踪和绕障等,本文就基本位置控制和轨迹跟踪问题,提出了模糊多变量控制结合神经网络控制方案,并给出了仿真结果和实际系统的控制结果,证明了该控制方案的优越性。
2 控制策略
板球系统球盘X、Y轴相互垂直,球盘具有绕X轴旋转和绕Y轴旋转两个自由度,对应于板绕 X 轴转动的倾角q1和绕Y轴转动的倾角 q2,角度以逆时针为正。
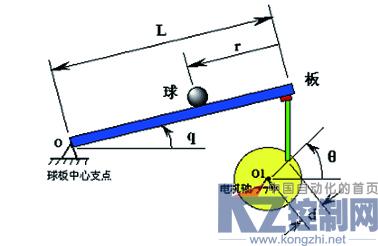
图2 板球转角和电机转角之间的关系
系统可以近似分解成x方向和y方向两个子系统,分别表示为:

其中:
考虑到x方向和y方向的对称性,下面只讨论x方向控制器的设计,y方向控制器与x方向相同,可用同一个控制器。控制器的输入为 和
和  以及
以及 ,输出为
,输出为 。
。
控制器的第一层为模糊化层,隶属度函数采用高斯函数;
 为第一层第i 个节点的输出, 即
为第一层第i 个节点的输出, 即 (i= 1,2….20;k=1,2,3,4)
(i= 1,2….20;k=1,2,3,4)
第二层为 (i=j=1,2….20)
(i=j=1,2….20)
第三层为 (k=1,2;n=1,…10;j=10(K-1)+n)
(k=1,2;n=1,…10;j=10(K-1)+n)
网络需要训练的参数有 ,
, ,
,  ,为了简化计算,假设所有隶属函数的中心值和宽度值都相等,即
,为了简化计算,假设所有隶属函数的中心值和宽度值都相等,即 ,
, 。离线训练这些参数,选定代价函数E为最优控制指标函数。因此模糊神经网络控制器的参数可以按照梯度法进行离线的训练:
。离线训练这些参数,选定代价函数E为最优控制指标函数。因此模糊神经网络控制器的参数可以按照梯度法进行离线的训练:
其中为学习率。
3 实验结果
结合Matlab仿真实验并做了实际系统实验,实验参数为:d=23mm,L=98mm,mb=38g,rb=15mm,球盘半径140mm。
对基本位置的控制达到了误差1mm以内,如图3所示,小球从初始位置(0,0)到达期望位置(50,50),图中‘+’所示即为其运动轨迹,x坐标误差0.62mm,y坐标误差0.56mm。
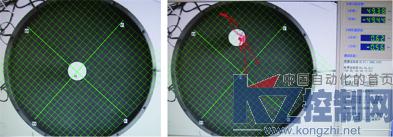
图3 小球从初始位置达到设定位置
在此基础上做了小球轨迹控制,其中,图a轨迹为从原点出发沿着x轴正向往返运动,图b轨迹为从原点出发沿s轨迹运动。

其中x=0-0.1m,即从原点到100mm。
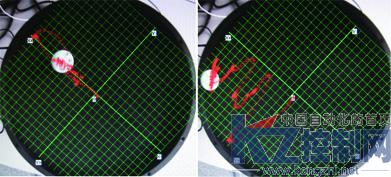
图4 运动轨迹控制图
4 结论
板球系统作为典型的多变量、非线性控制对象,对其特性及控制方法的研究很有意义。对板球系统的轨迹跟踪问题,本文提出了模糊多变量结合神经网络控制方案,从实验结果看,达到了0.6mm左右的位置控制误差,实现了较为精确的位置控制以及较好的轨迹控制效果。
其他作者:张伟民(1978-),男,河南洛阳人,硕士,助教,现就职于洛阳理工学院电气工程与自动化系,主要研究方向为自动控制。
参考文献:
[1] 王红睿,田彦涛.板球系统的参数自调整反步控制[J],控制与决策,2009.05.
[2] Zhang Xiaomei , Zheng Yufan , Lu Guoping. Delay2dependent robust H∞ control of uncertain Markovian jump systems over communication networks[C]. Proc of IEEE Int Conf on Control and Automation. Guangzhou ,2007 :8532857.
[3] Li Li , Valery A Ugrinovskii . On necessary and sufficient conditions for output feedback control of Markov jump linear systems [ J ] . IEEE Trans on Automatic Control,2007,52 (7) : 128721292.
摘自《自动化博览》2010年第八期

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号