



.jpg)



当前位置:首页»企业
.png)
- 企业简介
-
《自动化博览》立足于整个中国自动化产业,加强报道国家政府及相关部门针对自动化行业的政策、专项及相关发展规划。促进行业交流、引领产业发展,《自动化博览》立志于成为中国自动化领域中集实用技术与权威信息为一体的专业传媒。
- 公司类型:其他
- 联系方式
-
- 《自动化博览》
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116290
- 传真:59813329
- 网址:http://www.kongzhi.net
- Email:bjb@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 锅炉汽包水位模糊控制系统的仿真与设计 技术领域 运动控制 行业 市政 简介 锅炉汽包水位是一种非线性、时变大、强耦合的多变量系统。在建立了锅炉汽包水位为调节对象的数学模型基础上,应用MATLAB simulink软件对汽包水位控制系统进行验证和仿真,给出了传统PID控制和模糊PID控制的比较结果,同时采用PLC进行模糊控制,明显地改善了汽包水位控制系统的静、动态特性,从而实现了对锅炉汽包水位的最佳实时控制。 内容 (浙江工商职业技术学院,浙江宁波 315012)黄章明,李方园
基金项目:2010年浙江省大学生科技创新项目
摘要:锅炉汽包水位是一种非线性、时变大、强耦合的多变量系统。在建立了锅炉汽包水位为调节对象的数学模型基础上,应用MATLAB simulink软件对汽包水位控制系统进行验证和仿真,给出了传统PID控制和模糊PID控制的比较结果,同时采用PLC进行模糊控制,明显地改善了汽包水位控制系统的静、动态特性,从而实现了对锅炉汽包水位的最佳实时控制。
关键词:锅炉汽包水位;MATLAB;模糊控制
Digest:The boiler feed water is a nonlinear, time-varying large, strong coupling of multi-variable system. In the establishment of the mathematical model for a boiler feed water, MATLAB simulink software is used to control the drum water level. The fact is that the fuzzy PID control is better than the traditional PID control. Using the fuzzy PLC control, the static and dynamic characteristics are significantly improved in the steam drum water level system. Finally PLC system with the fuzzy-PID control is designed.
Keyword:Boiler feed water; MATLAB; fuzzy control
1 前言
目前,我国现有工业锅炉几十万台,各种工业炉窑十万余台。锅炉和工业炉窑年耗标准煤约3亿吨以上,是国家的一个耗能大户。由于技术落后、设备陈旧、操作水平低,目前锅炉和工业炉窑普遍存在着热效率低、能耗高的问题。
通过对锅炉自动调节任务的分析,我们知道工业锅炉的汽包水位是锅炉正常运行的主要指标之一。如果水位过低,则由于汽包内的水量较少,而负荷却很大,水的汽化速度又快,因而汽包内的水量变化速度很快,如不及时控制,就会使汽包内的水全部汽化,导致锅炉烧坏或爆炸;水位过高会影响汽包的汽水分离,产生蒸汽带水现象,会使过热器管壁结垢导致破坏,同时过热蒸汽温度急剧下降、如果该蒸汽作为汽轮机动力的话,还会损坏汽轮机叶片,影响运行的安全性和经济性。由此可见,锅炉给水系统采用自动控制是必不可少的,它对减轻运行人员的劳动强度,保证锅炉的安全运行具有重要意义。
本文以传统PID控制和模糊PID控制来对锅炉汽包水位进行仿真,并最后用PLC实现控制。经过对比,从而提出并设计了模糊PID控制的方案更优于传统PID控制。
2 锅炉汽包水位系统结构
如图1所示为本文所研究的锅炉汽包水位系统结构。

图1 锅炉汽包水位系统结构
通过现场了解,锅炉汽包水位和锅炉的给水流量和蒸汽流量都有关。当蒸汽流量与给水流量不平衡时,会产生“虚假液位”现象。这是汽包水位控制最主要要克服的问题之一。汽包水位模糊控制设计的目的就是要克服锅炉负荷变化所引起的“虚假液位”的影响和各种干扰对水位的影响,维持汽包水位在允许的范围内变化。
综合各类文献所述,在汽包水位控制上采用三冲量控制系统,即汽包水位作为主冲量信号,蒸汽流量作为前馈信号,给水流量作为内反馈信号的控制系统。以下给出以汽包水位三冲量的控制框图,如图2所示。
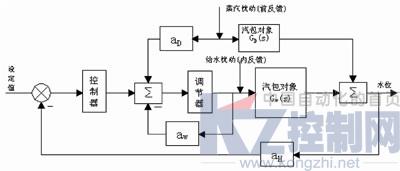
图2 汽包水位三冲量控制图
3 锅炉汽包水位模糊控制的Matlab仿真
图3是传统PID 控制系统原理图,PID 是一种线性控制器,它根据给定值rin(t)与实际输出值yout(t)构成控制偏差:
error(t)=rin(t)-yout(t)

式中: Kp是比例系数, TI是积分时间常熟,TD 是微分时间常熟。

图3 传统PID控制系统结构
在simulink环境下设计一个传统PID控制系统对锅炉汽包水位进行仿真。
首先,在MATLAB命令行中运行命令simulink, 打开simulink 模块。运行File-new-model, 建议一个新的模型。接着,在工作区域内加入如图4所示元件,并用导线连接起来,这样就建立了一个传统PID 控制系统。

图4 传统PID控制系统
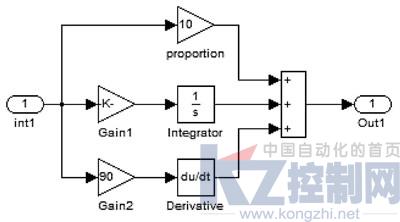
图5 PID内部结构
其中的Transfer Function是锅炉汽包水位的传递函数,PID Controller是个封装的子系统,内部结构如图5所示。
图6为P=10,I=0.001,D=90的仿真结果。
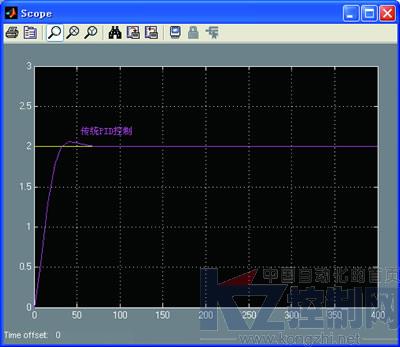
图6 传统PID控制系统仿真结果
模糊PID是一种把PID控制与模糊控制相结合,具有模糊控制灵活而且适应性强的有点,又具有PID控制器精度高的特点。模糊PID控制系统的结构如图7所示。由图7可知该系统由传统PID控制器和模糊推理控制器两部分组成,以偏差e和偏差变化率 作为模糊控制器的输入,根据模糊控制规则对PID参数进行自适应调整,以满足不同e和ec时对控制参数的要求。
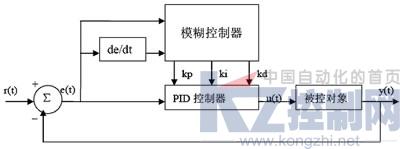
图7 模糊PID控制器系统结构
运行MATLAB,在命令窗口中输入simulink,打开simulink仿真界面,选择File-new-model, 建立一个新模型。接着,在工作区域内加入如下图所示元件,并用导线连接起来,这样就建立了一个模糊PID控制系统,如图8所示。
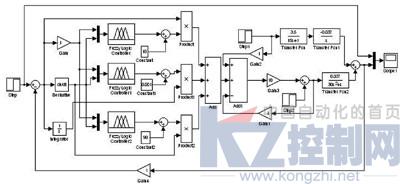
图8 模糊PID控制系统
图9为P=10,I=0.001,D=90的时两种不同控制方式下的仿真结果。从图中可以看出:模糊控制比传统PID控制的效果更佳。
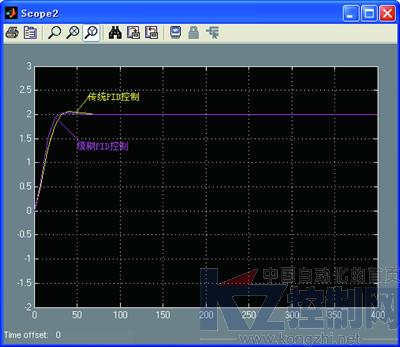
图9 传统PID控制与模糊PID控制仿真的比较结果
4 锅炉汽包水位模糊控制的PLC设计
在PLC设计中,可以针对锅炉中的液位参数的调节装置设计一个双输入、单输出的模糊控制器。如图10所示。输入变量分别是液位偏差E和液位偏差变化EC,输出变量为供水阀门开度。模糊控制器由精确量的模糊化、模糊控制算法的设计、输出信息的模糊判决三部分组成。

图10 模糊控制器结构
锅炉汽包水位控制系统数据采集、分析及处理均通过SIEMENS S7-300 PLC系统来完成,Fuzzy-PI双模控制软件通过编程来实现,软件流程如图11所示。
程序主要由OB1、FC1、FC2、FC3、FB1、FB2、FB3、DB1等多个功能和数据块组成,各块实现功能如下。
OB1:为系统循环组织块,实现系统初始值赋值及各功能块的调用;
FC1:完成液位实际值测量并先行转换;计算e=r-y并对e的绝对值大小进行判断,根据e的情况对FB1及FC2、FB2、FC3进行调节;
FC2:完成/e=de/dt的计算;
FC3:完成尺度变换及控制输出;
FB1:完成PI运算,并将结果线性化,输出结果U;
FB2:完成e、/E的模糊化,对FB3进行调节;
FB3:完成控制表查询;
DB1:存储模糊控制查询表数据。
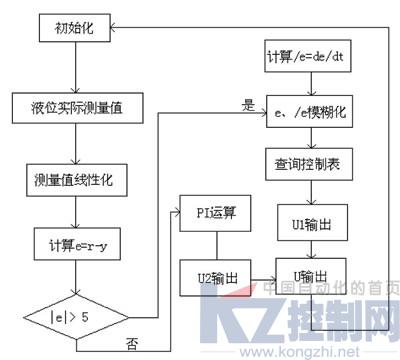
图11 软件流程图
5 结束语
采用FUZZY-PI控制结构,对非线性、难以建立精确数学模型的锅炉液面进行控制,既具有模糊控制鲁棒性强、快速响应的特点,又具有PI控制消除静态误差、控制精度高的优点。现场运行实践证明,此控制方式控制精度在±1.5mm误差范围内,取得了良好的控制效果。
参考文献:
[1] 陈平,陈小云.基于MATLAB的锅炉水位控制系统的设计与仿真[J].机电技术,2006(1)
[2] 张松兰, 刘延太. 锅炉汽包水位控制系统的设计[J].科技情报开发与经济,2008(14)
[3] 王东林, 刘文定. 过程控制系统的MATLAB仿真[M]. 北京:机械工业出版社,2009.
作者简介:黄章明(1991-),浙江工商职业技术学院电气自动化技术专业,主要从事自动化技术的应用。

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号