|

高天国 (1963-)
男,毕业于哈尔滨工业大学精密仪器系,主要从事新产品开发与设计工作。
摘要:本文介绍了一种新型串并联机床LINKS-EXE700的结构(Tripod机构),该型机床具有更大的工作空间,更好的刚度性能。并对Tripod机构自由度进行了理论分析,给出了工作空间的求解流程图,通过实例表明该型机床的工作空间较大,具有很好的应用前景。
关键词:串并联机床;自由度;工作空间
Abstract: This paper introduces the tripod system of the LINKSEXE 700 SerialParallel
Kinematic Machine with more workspace and higher rigidity construction, and gives a
theoretical analysis on the degree of freedom (DOF) of the tripod system and a solution
flow chart for the workspace. The operating example shows that the SerialParallel
Kinematic Machine has a large workspace and bright future in commercial applications.
Key words: serial-parallel machine tool; degree of freedom; workspace
1 引言
串并联机床属于新型虚拟轴机床,它是将并联机构和串联机构进行合理的结合而成,是近年来世界上逐渐兴起的一种新型结构机床[1,2]。哈尔滨量具刃具集团有限责任公司应用于瑞典艾克斯康(Exechon)公司最新技术(并联机构Tripod)合作推出了一种全新结构的机床LINKS-EXE700(以并联机构Tripod机构为核心开发的加工中心命名为LINKS-EXE700),该机床是一种典型的串并联机床。它综合了串联机床和并联机床的优点,克服了两者的不足之处,它具有:刚度高、承载能力强、机构灵活度高、动态性能好、响应速度快、工作空间范围大、重量轻、模块化程度高、技术附加值高和结构简单等很多突出的特点[3,4,5]。并引起了业内外人士的极大兴趣和广泛关注。这是一项立足于中国制造,运用国际先进技术资源,面向全球市场的最新一代串并联机床,也是近年来我国在国际机床领域的一项重大突破。
2 LINKS-EXE700机床结构
图1为LINKS-EXE700型串并联加工中心,该型加工中心的并联部分分别由两路TPR(虎克铰-移动副-转动副)支路和一路SPR(球铰-移动副-转动副)支路连接上方的定平台和下方的运动平台。在下平台的中部安装一串联机构,两关节皆为转动副。

图1 LINKS-EXE700型加工中心
3 Tripod机构的自由度分析
Tripod机构的简图如图2所示。该机构包括并联部分和串联部分,并联部分由定平台和动平台以及三个分支组成,其中有两个分支的一端与定平台用两自由度虎克铰连接,另一个分支的一端与定平台用三自由度虎克铰连接,三个分支的另一端分别与动平台用转动副连接,虎克铰与转动副之间是移动副;串联部分由两个轴线互相垂直的转动副组成。
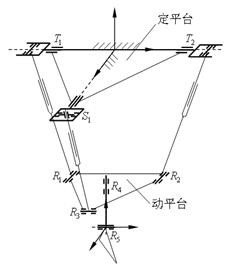
图2 Tripod机构的机构简图
在三维空间中,每个完全不受约束的刚体或构件有六个自由度,则 个刚体相对其中一个参照物共有6( -1)个自由度。当所有的刚体间用 个具有 自由度的运动副联接起来时,该机构的自由度为:
 (1) (1)
式中 F—机构的自由度;
n—构件数;
g—运动副数;
fi—第i个运动副的相对自由度数。
这就是著名的Kutzbach Grubler公式。
对于Tripod机构的并联部分n=8、g=9,则由式(1)计算得到并联部分的自由度 。而实际情况是机构并联部分的自由度是3,公式(1)失效。
为了求出机构并联部分的自由度,本文采取了一种简单可行的方法,即按照机构的组合过程一步一步地进行分析。并联部分的组合过程如图3所示。
图3 并联部分的组合过程
如图3所示,当形成第一步的机构时,可以采用求平面机构自由度的公式求解,此时有5个活动构件,6个低副,代入公式算得的自由度为3;由第一步到第二步多了两个转动副,变成了空间机构,由于两个转动副的轴线重合,所以只引入了一个转动自由度,此时机构的自由度变成了4;由第二步到第三步多了两个购件,一个移动副、一个转动副和一个三自由度虎克铰,两个不受任何约束的构件有12个自由度,移动副和转动副各约束掉5个自由度,虎克铰约束掉3个自由度,因此这一步引入的自由度为-1,整个并联部分的自由度变成了3。
显然,串联部分具有两个自由度。因此,Tripod机构是一个具有五个自由度的串并联机构。
4 Tripod机构的工作空间分析
工作空间是指机床正常工作时,末端执行器在空间活动的最大范围。工作空间从几何方面描述机床的工作能力,是并联机床性能的重要指标和进行机构设计、运动规划的重要依据。工作空间研究的基本问题是给出某一结构形式和结构参数的机床,求其工作空间的大小和形状。对于本文的机构,其工作空间的大小主要由运动平台的运动空间决定,因此,本文主要分析运动平台的可达空间。
考虑到并联机构位置逆解容易、正解难的特点,根据机构的位置反解方程,可采用快速极坐标搜索法进行工作空间边界的搜索,然后根据工作空间边界计算工作空间的体积。
4.1 机构工作空间的边界搜索
对于Stewart平台机构以及由其演化而来的其它并联机构的工作空间主要受以下几个方面的限制[6] :
(1) 各驱动杆长度的限制:并联机构各驱动杆的长度变化范围是有限的,这里用 和 和 来表示第 来表示第 杆的最大值和最小值,则杆长的约束可以用下式来表示 杆的最大值和最小值,则杆长的约束可以用下式来表示
 (2) (2)
当某一杆长达到极限时,运动平台上的给定的参考点也就到达了工作空间的边界。
(2) 运动副转角的限制:连接上下平台与各驱动杆的球铰、虎克铰以及转动副的转角范围都要受到结构的限制,因此,在对机构进行工作空间分析时,必须考虑运动副的最大转角 。运动副的转角 。运动副的转角 是由与运动副的基座固结的坐标系的Z轴和表示与运动副连接的杆的向量来确定的。如图4所示,li表示沿驱动杆方向的向量,nRi和nTi分别表示与各运动副的基座固结的坐标系Z轴方向的单位矢量。这样,运动副的转角约束条件可以用下式来表示 是由与运动副的基座固结的坐标系的Z轴和表示与运动副连接的杆的向量来确定的。如图4所示,li表示沿驱动杆方向的向量,nRi和nTi分别表示与各运动副的基座固结的坐标系Z轴方向的单位矢量。这样,运动副的转角约束条件可以用下式来表示
图4 运动副转角的约束
 (3) (3)
 (4) (4)
式中, 和 和 分别是球铰和虎克铰的最大转角。 分别是球铰和虎克铰的最大转角。
3) 杆间的相互干涉:因为连接上下平台的连杆是有一定的尺寸大小的,因此,各杆之间有可能发生干涉。为了讨论方便,这里假设各杆都是圆柱形的,其直径为D,若Di为两相邻杆中心线之间的最短距离,那么,两杆不发生干涉的条件为:
 (5) (5)
由于Tripod机构并联部分只有三个驱动杆,杆间发生干涉的可能性很小,所以进行工作空间搜索时只需考虑杆长限制和运动副转角限制两个约束条件即可。工作空间搜索步骤如下:
(1)给定机构基本结构参数,最大杆长 、最小杆长 、最小杆长 、运动副最大转角 、运动副最大转角 、 、 。 。
(2)令 从 从 开始以一定步长 开始以一定步长 增长,在 增长,在 平面内,使用极坐标表示 平面内,使用极坐标表示 、 、 ,则 ,则 , , 。 。 为搜索极径, 为搜索极径,  为极径与x轴正向的夹角,且设逆时针方向为正。 为极径与x轴正向的夹角,且设逆时针方向为正。
(3)给定一个 值后,令 值后,令 从0以步长 从0以步长 递增,直至机构的各杆长及运动副的转角超出所约束的极限值,输出 递增,直至机构的各杆长及运动副的转角超出所约束的极限值,输出 、 、 、 、 。此点即为 。此点即为 平面内, 平面内,  方向上工作空间的边界点。 方向上工作空间的边界点。
(4)令 ,重复步骤(3),直至搜索出 ,重复步骤(3),直至搜索出 平面内所有边界点。 平面内所有边界点。 的取值范围为 0°~360°。 的取值范围为 0°~360°。
(5)令 直至 直至  ,当确定一个 ,当确定一个  值后,重复(3)、(4)步,这样就可确定出机构的整个工作空间边界。工作空间搜索流程如图5所示。 值后,重复(3)、(4)步,这样就可确定出机构的整个工作空间边界。工作空间搜索流程如图5所示。
图5 工作空间搜索流程图
4.2 机构工作空间体积的计算
工作空间的大小通常用其体积V的值来定量衡量。由于其工作空间是不规则的几何形体,所以其体积无法用解析法精确的求得,只能通过数值方法来近似逼近。基本的思想是:先将工作空间用平行于XY平面的平面分割成若干厚度为 的微分子空间,若 的微分子空间,若 足够小,则这些子空间可近似看作高度为 足够小,则这些子空间可近似看作高度为 的柱体,将这些微分子空间的体积累加起来就近似等于机构工作空间的体积。 的柱体,将这些微分子空间的体积累加起来就近似等于机构工作空间的体积。
每个微分子空间底面边界上的任意一点P都可用极坐标来表示,则 , , 。如图6所示,设 。如图6所示,设 是微分子空间底面边界上的起始点,然后给极角△一增量 是微分子空间底面边界上的起始点,然后给极角△一增量 后,得到下一边界点 后,得到下一边界点 ,如此进行下去,便可确定出此微分子空间底面的所有边界点,依据这些边界点可将微分子空间底面分成若干夹角为 ,如此进行下去,便可确定出此微分子空间底面的所有边界点,依据这些边界点可将微分子空间底面分成若干夹角为 的形如扇形的微分子区域,若 的形如扇形的微分子区域,若 足够小,则每个微分子区域的面积 足够小,则每个微分子区域的面积 可借助扇形公式近似求得,即 可借助扇形公式近似求得,即
 ( (  ) (6) ) (6)
这样每个微分子空间的体积 可借助柱体的体积公式求得,即 可借助柱体的体积公式求得,即
 ( (  ) (7) ) (7)
于是机构工作空间的体积V可近似求得,即
 ( (  ) (8) ) (8)

图6 机构微分子工作空间截面
由以上分析可知机构的工作空间体积的计算精确度与增量 的大小有关,增量越小,计算结果越精确。但随着增量 的大小有关,增量越小,计算结果越精确。但随着增量 的减小,计算量将成倍的增加,因此,确定增量 的减小,计算量将成倍的增加,因此,确定增量 的取值大小时,应考虑实际情况,适当选取。 的取值大小时,应考虑实际情况,适当选取。
以LINKS-EXE700为例,其结构参数及运算过程中的搜索变量如下:
 , ,
 , , , ,
 , , , ,



 , ,
 , ,
 , ,
经过运算,并利用MATLAB的图形功能描绘出的机构工作空间的轮廓如图7所示。
图7 机构工作空间轮廓图
图7是工作空间的三维立体图和工作空间在XY平面上的投影图。同时,经过运算得出机构的工作空间可达1431×109 mm3,查阅有关参考文献可知,一般并联机床的工作空间远不及这个数值,如文献[7]中的并联机床的工作空间的体积为 0.607×109 mm3,这说明Tripod机构具有较大的工作空间。
5 小结
本文介绍了LINKS-EXE700型串并联加工中心的构型及特点,并根据机构的组合过程分析了机构的自由度,对LINKS-EXE700型串并联加工中心工作空间的搜索算法进行了研究,并计算了工作空间的大小,总结了LINKS-EXE700型串并联加工中心相对于其他并联机构具有更大工作空间的原因。
参考文献
[1] 陈文家, 王洪光, 房立金. 并联机床的发展现状与展望[J]. 机电工程, 2001, 18(4): 5-8.
[2] 汪劲松, 黄田. 并联机床—机床行业面临的机遇与挑战[J]. 中国机械工程, 1999, 10(10): 1013-1107.
[3] 王瑞, 钟诗胜, 王知行. 5轴新型数控铣床仿真建模的实现[J]. 计算机集成制造系统, 2005, 11(8): 1176-1180.
[4] 詹泳, 周云飞, 师汉民. 串并联数控机床的作业空间分析[J]. 应用科学学报, 2004, 22(1): 60-65.
[5] 王友渔, 赵兴玉, 黄田. 可重构混联机械手TriVariant与Tricept的静动态特性预估与比较[J]. 天津大学学报, 2007, 40(1): 41-45.
[6] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社, 2006. 159-163.
[7] 张祥, 金振林. 新型三自由度并联机床的工作空间分析[J]. 燕山大学学报. 2006, 30(2): 147-150.
|




.jpg)




 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号