



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 一种低功耗自动增益放大电路的设计与应用 技术领域 行业 简介 本文给出了一种简单且易于实现的低功耗自动增益电路,该设计已成功应用于电缆深度控制器接收机中,并能明显的改善通信效果。 内容 (中国船舶重工集团公司第七一○研究所,湖北 宜昌 443003)任宏伟
任宏伟(1983-)男,甘肃酒泉人,毕业于吉林大学,目前从事水中兵器及海洋勘探测试仪器研究。
摘要:本文给出了一种简单且易于实现的低功耗自动增益电路,该设计已成功应用于电缆深度控制器接收机中,并能明显的改善通信效果。
关键词:低功耗;增益控制
Abstract: He paper describes a kind of amplifier circuit that the gain is variable.And the circuit is simple and easy to realize. The design has already been applied in the receiver of the communication system in cable depth controller,and can obviously improve correspondence effect.
Key words: Low power; variable-gain
拖曳式线列阵地震数据采集系统是目前海洋石油勘探的主要设备,该数据采集系统通过勘探船拖曳线列阵接收地震回波。为了保持拖曳缆能够保持在一定深度稳定工作,在拖曳缆上需间隔200m放置一套电缆深度控制器,通常拖曳缆长达6000m,因此每条拖曳缆上将放置多达30套电缆深度控制器,以达到拖曳缆能在水下设定深度稳定。
由于信号随着线缆的延长将逐渐衰减,因此,对于线缆上不同节点的电缆深度控制器接收到的信号强度将会不一致。电缆深度控制器的接收机如何能够保证解调不同强度的信号呢针对这个问题,本文设计了一种简单低功耗的自动增益电路,该电路能针对不同信号自动改变增益,使得解调输入前的信号幅度保持在最佳解调幅度以内。
1 自动增益控制电路的设计与实现
目前放大器增益的控制方法主要有两种。一种是改变放大器本身的参数,使增益发生变化,典型的是采用双栅场效应管,通过改变其中某一栅的直流偏置电压使增益发生变化;另一种是在放大器级间插入可变衰减器,控制衰减量,使增益发生变化,典型的是各种集成的可变增益放大器。这两种增益的改变通常都需配合A/D采样,单片机处理后输出控制电压来改变增益,实现起来较为繁琐,且电缆深度控制器使用电池供电,以上两种可控增益电路功耗过大,不适合于电缆深度控制器使用。因此本文设计出一种简单而又易于实现的低功耗自动增益控制电路,该电路只需通用的运算放大器、比较器和多路模拟开关组合即可实现。电路原理框图如图1所示。
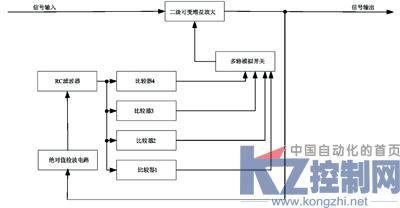
图1 自动增益控制电路框图
电缆深度控制器接收机接收到控制器的指令信号后,经过低通滤波器滤除高频成分噪声信号,信号经两级放大后,由绝对值检波电路检波,经RC滤波后得到信号的有效值,该有效值与比较器的参考电压进行比较后输出电平,通过比较器输出的电平数字组合,控制多路模拟开关的不同开关导通,从而改变二级放大器的输入电阻发生变化来改变放大器的增益。
本设计具体应用于电缆深度控制器调制解调板的前置放大电路中,可变增益分别为G=1,2,4,8,16,各模块设计电路如图2至图4所示。

图2 绝对值电路原理图
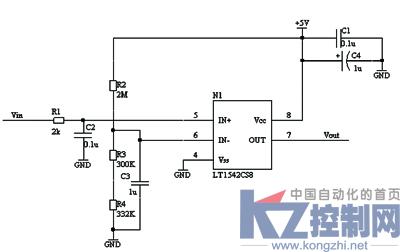
图3 比较器电路原理图
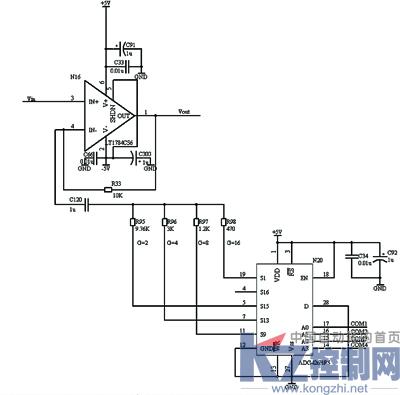
图4 增益选择开关电路原理图
反馈信号经绝对值检波电路检波输出后,经RC滤波输出信号的有效值。有效值与4路比较器的参考值REF=1.2V,0.6V,0.3V,0.15V作比较,当Vinrms〉1.2V时,4路比较器输出为1111,此时选通16路模拟开关ADG426的S16,此时放大器实现了跟随器的作用,Vout=Vin。当0.6V<Vinrms<1.2V时,4路比较输出为0111,此时选通16路模拟开关ADG426的S15,使得R95接地,因此增益G=2;当0.3V< Vinrms<0.6V时,比较器输出0011,此时选通ADG426的S13,使得R96接地,因此增益G=4;当0.15V< Vinrms<0.3V时,比较器输出0001,使得R97接地,此时选通ADG426的S9,增益G=8;当Vinrms<0.15V时,比较器输出0000,使得R98接地,此时选通ADG426的S1,增益G=16。比较器的参考电压可以根据实际的需求作出相应调整,使放大输出信号幅度保持在最佳解调范围内。
2 应用结果
本文所给出的电路设计是在先期产品试验暴露的问题上提出的改进方案,在未采用自动增益控制电路时,电缆深度控制器接收机只是做了固定增益放大,考虑到信号需逐级放大,单级放大增益不能过大,否则会发生信号畸变。接收机信号放大增益分别为一级增益G1=5,二级增益G2=4,三级增益G3=5,总的增益为100。前期接收机试验发现,由于电缆深度控制器在不同距离的节点接收到的下发指令信号的衰减不一样,最前端的信号最强,信号可达到1V左右,最尾端的信号强度最弱,信号可接近2.5mV左右,因此经过固定增益放大后,信号在0.25V~10V(放大器采用±5V供电满幅值输出信号畸变),经过限幅处理后,进入解调单元的信号在0.25V~1V左右,其信号强度差异较大。对于解调单元芯片,其最佳解调的信号在0.5V-1V之间,对于这种信号强度跳跃大的,解调脉冲宽度容易出现较大差异,从而导致解调误码数据,出现部分电缆深度控制器通信效果差。由于该系统通信效率为串行效率,因此部分电缆深度控制器的高误码率将会导致整个系统工作通信成功率低。因此提出改进前置放大自动增益控制的方案,改进后的增益控制电路,能够根据节点的信号强度在25~400之间自动调整增益大小,始终保持当前节点的信号强度处于1V左右幅值范围内,极大的提高了通信成功率。
为验证自动增益电路的可行性,采用标准信号源将26kHz正弦信号输入到接收机的前置放大电路,从1mV~10V改变信号的幅值大小,通过示波表观察自动增益放大电路输出波形,可以发现输出信号幅值始终处于1V左右,很好的验证了自动增益电路的可行性。接收机改进前通过湖上试验的结果表明,经常有部分电缆深度控制器通信数据丢失,系统通信成功率始终无法突破70%。通过改进此增益控制电路,经过多次湖上试验和多次海上验证试验表明,系统通信成功率已达到90%,通信效果明显改善。
3 结束语
本设计已成功应用于电缆深度控制器接收机中,并能很好实现自动增益控制,改善了电缆深度控制器的通信效果,提高了拖曳线列阵的通信成功率。该电路选用微功耗芯片,根据实际使用检测结果,该电路的设计功耗只有2mA左右。因此该自动增益控制电路非常适合采用电池供电的设备使用。
参考文献:
[1] 刘文涛,徐钊. 小信号测量系统的设计[J]. 山西电子技术,2006(3).
[2] 杜江,张德琨.SLC系统中自动增益程控的主设计[J].桂林电子工业学院学报,1996(6).
[3] 王俊杰,黄心汉. 程控增益放大器和自动调整增益放大器的设计[J]. 电子技术应用,1998(4).
摘自《自动化博览》2010年第七期

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号