



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 海上地震拖缆自动定深器建模及仿真研究 技术领域 行业 简介 本文首先对自行研制的海上地震拖缆自动定深器建立了较为详细的数学模型,给出了其传递函数模型,然后在Matlab环境下,利用仿真工具Simulink和控制系统工具箱(Control System Toolbox)中的SISO工具设计了经典控制器,并且对该系统进行了仿真分析,仿真结果表明:利用本文所设计的控制器,该系统具有较好的动态特性。 内容 (中船重工第七一○研究所,湖北 宜昌 443003)苗建明

苗建明(1979-)男,山西长治人,毕业于太原理工大学,硕士,从事海洋设备研究及海洋物探设备开发工作。
摘要:本文首先对自行研制的海上地震拖缆自动定深器建立了较为详细的数学模型,给出了其传递函数模型,然后在Matlab环境下,利用仿真工具Simulink和控制系统工具箱(Control System Toolbox)中的SISO工具设计了经典控制器,并且对该系统进行了仿真分析,仿真结果表明:利用本文所设计的控制器,该系统具有较好的动态特性。
关键词:拖缆;深度;控制;建模;仿真
Abstract: A kind of math model of auto-depth dragging cable controller on offshore seismic is proposed in this paper. The transfer function of dragging cable controller is first established, and then the typical controller is obtained by using Simulink and SISO tool in the Control System Toolbox in Matlab.Finally, the control system is simulated and analyzed. The results indicate that the designed controller has good dynamic characteristics.
Key words: Dragging cable; depth control; modeling simulation
1 概述
海上地震拖缆深度控制系统是海上地震石油勘探系统中的重要设备之一,主要用于控制数根长达十多公里的拖缆在海上地震石油勘探过程中保持在设定的深度和位置稳定运行。 其主要通过对海上地震拖缆多个节点处安装自动定深器来实现深度控制,其每个节点通过压力传感器实时测得该段电缆深度,然后通过微处理器对其进行实时调节,达到深度自动闭环控制的目的,本文在对自行研制的定深器系统建立较为详细的数学模型的基础上,设计了一经典控制器,并且对其进行仿真研究。
2 电缆深度控制系统数学模型的建立
海上地震拖缆深度控制系统主要通过直流伺服电机、减速器驱动丝杠螺母机构,带动摇杆机构进行翼板攻角的调节,进而实现深度控制的目的,其工作原理如图1所示。下面建立其各组成部分详细的数学模型。

图1 海上地震拖缆深度控制系统工作原理图
2.1 直流电机的数学模型
直流电机是动态系统中经常用到的设备,通常通过控制电枢电压Va来控制电机角速度ω(t), 其传递函数模型如式1所示,其中:Va为输入电压,L和R分别为电枢的自感和电路的等效电阻,T(t)和ω(t)为电机的输出转矩和输出角速度,Vemf为转子绕组的反馈电动势,kf×ω(t)为系统的粘性阻尼,其中,Km为力矩常数,主要取决于电机的物理结构;TL为负载力矩。
.jpg) (1)
(1)
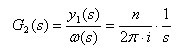
2.2 被控对象数学模型的建立
这里被控对象是减速器、传动机构(丝杠、螺母)、翼板及整个定深器的深度调节的通称。下面逐个建立其数学模型:设减速器减速比为i,丝杠螺母的螺距为n(mm),螺母的运动行程为y1(mm),则有以下方程:
 (2)
(2)
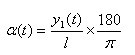
摇杆的长度为lmm,翼板的攻角为α°,则有以下方程:
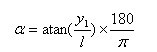 (3)
(3)
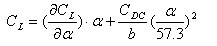
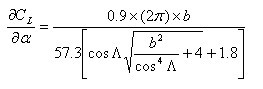
设升力为Lkg,翼板的升力系数为CL,ρ为海水密度,v为拖曳速度,b为翼板的展旋比,A为翼板面积,c为翼板平均弦长,CDC为翼板的横流阻力系数(可查表求得),Λ为翼板的后掠角,可以得到下面的方程:
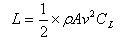 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
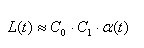
将(12)、(13)、(14)式带入式(11)中得到:
 (8)
(8)
其中:

设定深器及电缆的等效负浮力为G(kg),定深器的深度为h(t)(m),定深器及电缆的等效质量为m,阻尼系数为c,则有:
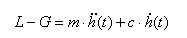 (9)
(9)
联立(9)、(10)、(15)、(16)式,则可得到被控对象完整的数学模型。
对(9)式求Laplace变换,并且假设初始条件为零,可以得到减速器和传动机构的传递函数模型为:
 (10)
(10)
可以看出,减速器和执行机构的传递函数模型为一典型的积分环节。
由于翼板为非线性环节,为求其传递函数,需首先将其线性化:
将式(10)在α=0°处线性化,可得
 (11)
(11)
式(15)中,由于,将略去,可得翼板的线性化模型:
 (12)
(12)
对式(18)、(19)求Laplace变换,得翼板的传递函数为:
 (13)
(13)
对式(16)求Laplace变换,得:
 (14)
(14)
因此,整个被控对象的传递函数模型为:
 (15)
(15)
3 控制系统设计及仿真分析
3.1 直流电机调速系统设计
由于在定深器工作时由于航速的不稳定,或者有海流的影响等,可能出现瞬时的负载突变,因此应该设计电机调速系统,即通过对系统输入一定的电压,使电机带动负载以期望的角速度运动,并要求有一定的稳定裕度。本文设计的直流电机调速系统模型如图2所示,利用Control System Box中的单输入单输出工具来设计补偿器模型,结果为C(s)=50/t,图3为给系统在1s到2s之间加一个负载扰动TL后系统的阶跃响应仿真结果。从图中可以看出,本调速系统明显的提高了系统抗负载干扰能力。
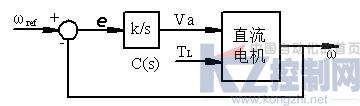
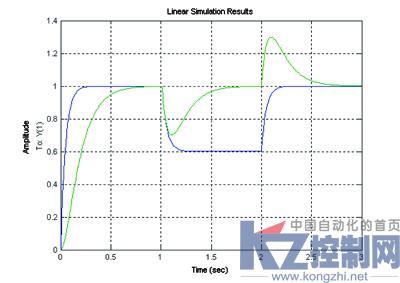
图3 电机在设计补偿器作用下的阶跃响应曲线
3.2 电缆深度控制系统校正环节的设计及仿真分析
前面设计了电机的调速系统和建立了被控对象的数学模型,将各参数带入其中,可得到阶跃响应曲线如图4所示,结果显示为不稳定系统,因此必须设计校正环节以使系统稳定。
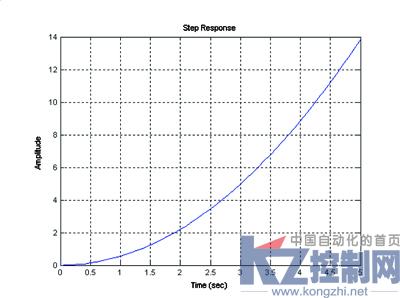
图4 被控对象阶跃响应曲线
由于该系统为相位滞后的不稳定系统,因此考虑设计比例-微分超前控制器,在Matlab的SISO系统设计工具中设计系统的补偿器C(s),设计结果为 ,其根轨迹及系统开环波德图如图5所示,结果表明,通过加入两个微分超前校正环节和一个比例环节后,本系统变为稳定系统,其幅值裕量为23.1dB,相位裕量为63.7°。
,其根轨迹及系统开环波德图如图5所示,结果表明,通过加入两个微分超前校正环节和一个比例环节后,本系统变为稳定系统,其幅值裕量为23.1dB,相位裕量为63.7°。
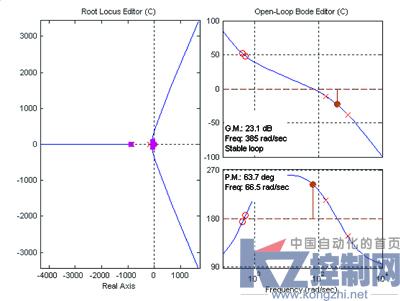
图5 系统根轨迹图及开环波德图
把电机调速系统模型、被控对象模型及设计的比例微分控制器模型转化为atlab/Simulink环境下的仿真模型如图6所示,整个系统的阶跃响应曲线如图7所示。从图中可以看出,系统的上升时间为0.2s、峰值时间为0.65s、调节时间为2.45s、最大超调量为10%。

图6 系统Simulink模型框图

图7 系统阶跃响应曲线
4 结语
本文在首先建立海上地震拖缆自动定深器数学模型的基础上,设计了系统的经典控制器,并且进行了仿真分析,结果表明,本文设计的控制器可以为实际系统的实现提供了一定的参考依据。
参考文献:
[1] 吴家鸣,叶家玮,李宁. 拖曳式多参数剖面测量系统水动力与控制性能研究述评[J]. 海洋工程 2004,22(1):111-120.
[2] 邓德衡,黄国樑,楼连根. 拖曳线列阵阵形与姿态数值计算[J]. 海洋工程,1999,17(1):17-26.
[3]李志印,吴家鸣. 水下拖曳系统水动力特性的计算流体力学分析[J]. 中国造船,2007,48(2):9-18.
[4] 王飞. 海洋勘探拖曳系统运动仿真及控制技术研究 [D] . 上海:上海交通大学,2007.
[5] 张攀. 拖曳系统运动仿真计算 [D]. 武汉:武汉理工大学,2005.
摘自《自动化博览》2010年第六期

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号