



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 滞后系统控制策略及仿真研究 技术领域 运动控制 行业 简介 针对滞后控制系统的特点,结合控制系统的数学模型,分析了微分先行控制、中间微分控制、史密斯补偿控制、增益自适应补偿控制和改进史密斯控制等具体方案,并通过MATLAB环境进行了仿真研究,为进行滞后系统的可靠控制提供相关理论依据。 内容 (许昌学院 电气信息工程学院,河南 许昌 4610姚 宁,王 武

姚宁(1980-)女,河南许昌人,讲师,硕士,主要从事探测器,电子线路研究。
基金项目:河南省教育厅自然科学研究资助项目(2008A510014)
摘要:针对滞后控制系统的特点,结合控制系统的数学模型,分析了微分先行控制、中间微分控制、史密斯补偿控制、增益自适应补偿控制和改进史密斯控制等具体方案,并通过MATLAB环境进行了仿真研究,为进行滞后系统的可靠控制提供相关理论依据。
关键词:滞后系统;数学模型;控制方式;仿真
Abstract: Aiming at the features of large lag system, this paper analyses differential ahead PID control, intermediate differential control and Smith control combining with mathematical models. The simulation under MATLAB is done, which proves that these control strategies can be applied into time delay system.
Key words: Time Delay System; Mathematical Models; Control Mode;Simulation
1 引言
在现代工业生产过程中,普遍存在着时滞,典型的时滞工艺过程有皮带输送过程、管道输送过程及大多数热力过程等。滞后产生的主要原因有:对系统变量的测量、系统中设备的物理性质或信号的传递等。这类控制过程的特点是:当控制作用产生后,在滞后时间范围内,被控参数完全没有响应,使得系统不能及时随被控制量进行调整以克服系统所受的扰动[1]。所以这些对象的纯滞后时间对控制系统的控制性能都极为不利,它使系统的稳定性降低,动态特性变坏。国内外学者对滞后系统进行了许多新的控制策略研究,肖军等提出了滞后系统的前馈——反馈预估控制[2]。马军爽等提出模糊RBF神经网络控制[3] 。文定都等针对纯滞后系统提出神经网络Dahlin控制[4]。
2 滞后系统控制策略
2.1 常规控制系统
在纯滞后系统控制中,为了充分发挥PID的作用,改善滞后问题,主要采用常规PID的变形形式:微分先行控制和中间微分反馈控制。
微分先行控制和中间微分控制都是为了充分发挥微分作用提出的。微分的作用是导前,根据变化规律提前求出其变化率,相当于提取信息的变化趋势,所以对滞后系统,充分利用微分作用可以提前预知变化情况,进行有效的“提前控制”。在微分先行控制方案中,微分环节的输出信号包括了被控参数及其变化速度值。将它作为测量值输入到比例积分调节器中,这样使系统克服超调的作用加强,从而补偿过程滞后,达到改善系统控制品质的目的。与微分先行控制方案的设想类似,采用中间微分反馈控制方案能加快系统的反应速度进而改善系统的控制质量。微分先行和中间微分反馈方法都能有效地克服超调现象,缩短调节时间而且不需特殊设备[5]。因此,这两种控制形式都具有一定的实际应用价值。但是这两种控制方式都仍有较大超调且响应速度很慢,不适于应用在控制精度要求很高的场合。
2.2 史密斯补偿控制
为了从根本上采取措施消除或部分消除滞后对控制系统控制品质的影响,发展了补偿控制方法。补偿控制方案是有目的地对滞后进行补偿,这种方法比微分先行和中间微分反馈方法更能起到提高纯滞后系统控制质量的目的。补偿控制是由史密斯最早提出来的,后来经过不断的研究与改进提出了许多修正的补偿控制方案。纯滞后补偿控制的基本思路是:在控制系统中某处采取措施(如增加环节或增加控制支路等),使改变后系统的控制通道以及系统传递函数的分母不含有纯滞后环节,从而改善控制系统的控制性能及稳定性等[6]。
纯滞后补偿的基本原理如图1所示。图中G(S)不含有滞后,GP(S)为增加的补偿环节。
.gif)
图1 纯滞后补偿的基本原理
令增加补偿后的传递函数为:
 (1)
(1)
则得:
 (2)
(2)
即为消除滞后所采用的补偿函数。
通过附加并联环节GP(S)的补偿处理X(S)和Y(S)之间传递函数不再表现为滞后特性。
史密斯提出的补偿方案如图2所示。
系统传递函数为:
 (3)
(3)
可见,经补偿后,传递函数特征方程中已消除时间滞后项,也就是消除了时滞对系统控制品质的影响[7]。
.gif)
图2 史密斯补偿控制系统方框图
2.3 完全抗干扰史密斯补偿控制
完全抗干扰的史密斯滞后补偿控制系统是在史密斯控制方案的基础上,增加一个反馈环节 ,从而实现系统的完全抗干扰(当然,系统特性辨识不精确也可看成一种扰动),如图3所示。
.gif)
图3 完全抗干扰史密斯补偿控制
系统闭环传递函数为:
 (4)
(4)
系统干扰传递函数为:
 (5)
(5)
系统完全不受干扰的影响,由此得:
 (6)
(6)
即:
 (7)
(7)
2.4 增益自适应性补偿控制
增益自适应性补偿控制是在史密斯补偿控制基础上增加了一个除法器、一个导前微分环节和一个乘法器。利用这三个环节根据模型和过程输出信号之间的比值来提供一个自动校正预估器增益的信号。实际过程控制对象的特性是随时间变化的,此时,增益自适应控制系统便成为一个复杂的增益自适应调整控制过程,如图4所示。
.gif)
图4 可变增益自适应性补偿控制
图中的增益KP随着估计模型和输出的变化而变化,从而在一定程度上补偿系统的特性时变。
改进型史密斯补偿控制方案的最大特征是比其他方案多了一个调节器,结构图从略,改进型史密斯补偿控制其参数整定比较简单。理论分析证明改进型方案的稳定性优于原方案,其对模型精度的要求明显降低,有利于改善系统的控制性能。
3 滞后系统控制仿真
以某恒温箱的恒温过程控制为研究背景。其中,输入量为燃油量,输出量为温度[8]。利用系统辨识方法,得系统数学模型:
 (8)
(8)
分别采用串联PID控制,微分先行控制和中间微分控制进行仿真,仿真波形如图5所示,可见,采用微分先行控制和中间微分控制,阶跃响应曲线平稳,超调量小。为了验证在扰动作用下,系统的抗干扰能力,保持PID整定参数, ,不变,给系统增加幅值为0.1的随机干扰信号,干扰信号下系统的输出响应如图6所示,可见,常规控制下系统的抗干扰能力很差。
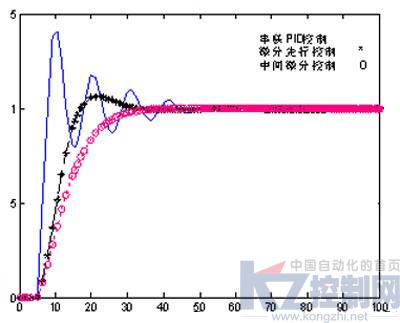
图5 基本控制方式下系统阶跃响应曲线
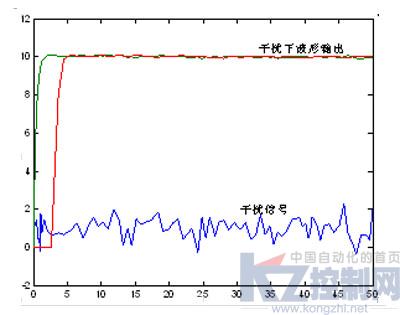
图5 基本控制方式下系统 扰动相应曲线
在估计器无差估计过程模型的理想情况下,采用增益自适应补偿控制对某一化学反应过程进行仿真。其中,输入为原料量,输出为反应所生成的产品产量[9]。利用系统辨识方法,得系统数学模型:
 (9)
(9)
采用增益自适应补偿控制,系统在干扰信号的作用下,响应曲线如图7所示,可见,增益自适应补偿控制可以取得很好的抗干扰能力,并且响应速度快,超调量小。
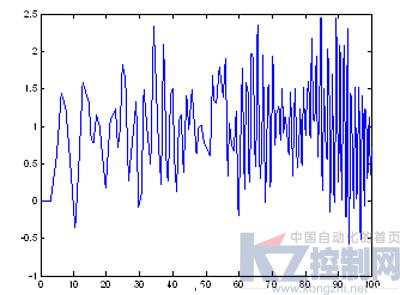
图7 增益自适应补偿控制下响应曲线
3 结束语
论文结合控制系统的数学模型分析了滞后系统的控制策略,并通过仿真研究了各种控制策略的性能,论文在具体仿真过程中略去了系统辨识、控制方法选择、控制参数整定等具体内容,只是结合论文所提出的控制策略进行了系统仿真和分析对比,给出了滞后系统控制的一些方法。通过其他智能控制策略进行滞后系统控制也是很好的方法,国内外研究学者也取得了相关成果,将在后续研究中进行开展。
其它作者:王武(1978-),男,甘肃兰州人,讲师,硕士,主要从事控制理论与控制工程、智能控制方向的研究。
参考文献:
[1] 曹立学,令朝霞,蒋军. 大滞后多变量计算机控制系统的设计与研究[J].计算机工程与设计,2008,(9): 4885~4887.
[2] 肖军,张桂香. 滞后系统的前馈——反馈预估控制[J]. 微计算机信息,2009,3: 10~12.
[3] 马军爽,郭耀华,王维. 模糊RBF神经网络在纯滞后系统中的应用[J].冶金设备,2008,(1): 1~6.
[5] 文定都. 针对纯滞后系统神经网络Dahlin控制的研究[J]. 自动化与仪表,2008,(12): 38-43.
[4] 俞金寿. 过程控制系统和应用[M] . 北京: 机械工业出版社,2003.
[6] 邵惠鹤. 工业过程高级控制[M]. 上海: 上海交通大学出版社,1997.
[7] 邵裕森,戴先中.过程控制工程[M]. 北京: 机械工业出版社,2000.
[8] 王正林. MATLAB/Simulink与控制系统仿真[M]. 电子工业出版社,2005.
[9] 刘金琨. 先进PID控制MATLAB仿真(第2版)[M]. 北京: 电子工业出版社,2004.
摘自《自动化博览》2010年第四期

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号