



.jpg)



当前位置:首页»企业

- 企业简介
-
作为中国自动化领域的权威旗舰网络媒体,控制网创立于1999年7月,是中国举行的第十四届IFAC (International Federation of Automatic Control)大会的中国官方组织机构的唯一指定网站。控制网是中国自动化学会专家咨询工作 委员会(ECC)的秘书处常设之地。是北京自控在线文化传播有限公司开设的网站。
- 公司类型:其他
- 联系方式
-
- 控制网
- 地址:北京市海淀区上地十街辉煌国际2号楼1504室
- 邮编:100085
- 电话:010-57116291 / 59813326
- 传真:010-59813329
- 网址:http://www.kongzhi.net
- Email:mahongliang@kongzhi.net
- 联系人:市场部
- 案例详细
-
标题 基于图像处理的微位移检测方法研究 技术领域 机器视觉 行业 石油天然气 简介 内容 (中海油研究总院,北京 100027)郑 伟,蒋徐标

郑伟(1985-)男,山东单县人,硕士,中级职称,仪控工程师,现就职于中海油研究总院。
摘要:本文研究了一种基于模板匹配的在图像序列中目标定位的方法,采用金字塔搜索法以及全局—局部搜索法提高算法速度,采取基于双三次插值法的亚像素技术提高定位精度。实验验证了方法的可行性。
关键词:亚像素;模板匹配;双三次插值;相关系数
Abstract: A method of target location based on template matching in image sequence is developed. Pyramid matching method and global-search&localsearch is used to improve matching speed. Bicubic interpolation is adopted to promote accuracy. The feasibility and validity is verified by simulation and experiment.
Key words: Sub-pixel; Template matching; Bicubic interpolation; Correlation coefficient
1 引言
数字图像测量技术是一种以图像为载体并从中提取有用信息的方法,目前已广泛应用于工业检测、卫星遥感、机器视觉以及大规模集成电路制造等相关的技术领域。
目标的匹配与定位是数字图像测量系统的关键技术,对此人们已提出了许多经典算法,但大多数匹配算法的定位精度都是像素级的。随着机械设备制造向着高复杂性、高精度发展,对元件检测和定位精度的要求越来越高,普通意义下的像素级精度已不能满足要求。提高匹配定位精度有两种途径:一是从硬件上提高摄像系统的物理分辨率;二是改进算法采取亚像素法进行定位。
由于高精度摄像系统一般价格十分昂贵,并且摄像系统所能达到的最大分辨率也受着当前技术水平的制约,所以采用亚像素技术提高匹配定位精度是一个切实可行的途径。本文将以抽油机游梁支点微位移检测为例,简要阐述这一方法在实际工程生产中的应用。
2 模板匹配法
模板匹配法是数字图像测量技术中最基本的方法之一。此法是将所要检测物体的模板与源图像中所有位置的区块进行比较,考察是否存在与模板匹配的区块。例如,在图1-a中,寻找有无五角星(图1-b)。若在源图像中存在待寻目标,则目标与模板具有相同的大小与方向。模板匹配法的基本原则就是通过相关系数的计算来找到目标在源图像中的位置。

图1 模板匹配示例
2.1 模板的动态建立

图2 模板及其源图像示例
设模板T叠放在源图像S上平移,模板覆盖下的那块源图像叫做子图S(i,j),i,j为这块子图左上角像素点在S图中的坐标。模板的恰当选取对于提高匹配精度十分重要。
本文抽油机游梁支点微位移的测量,是通过对图像序列的处理实现的。可以手动取第一帧图像中的目标区块为模板,用此模板对图像序列中的目标区块的位置进行匹配。由于模板直接取自源图像,因此该方法方便灵活并且适用于任意特征的目标。
2.2 相关系数的描述
比较T和S(i,j)的内容,若两者之差为零,则认为两者相匹配。模板与源图像的相关系数C(i,j)可以用下面的函数描述:

其中,Sm与Tm分别是S(i,j)与T在各自相关窗口的平均值。不难看出,相关系数C(i,j)的取值范围为[0,1]。通常情况下,当模板与源图像相似度大于0.8时,可认为二者匹配;相关系数小于0.6时,可认为目标是可疑的。相关匹配法不仅定出了目标的位置,而且还给出了目标的可信度。
2.3 匹配速度的改进
相关匹配法的主要缺点之一就是计算量大。在本实验中,对于一帧502×502的源图像,如果逐像素点搜索,一共要进行502×502次求相关系数C(i,j)的计算,这样搜索完一帧图像要耗费10秒左右,这个速度已远远不能满足实时处理图像序列的要求。
为了提高匹配速度,可采用金字塔搜索法,先对一帧图像的整个搜索区域采取大步长进行相关运算,找到相关系数的极大值,然后以此极大值点为中心缩小搜索区域和步长,再进行相关运算。重复上述过程,直至在最小步长的相关系数矩阵中找到该帧图像的极大值点。
由于抽油机游梁支点位移范围很小,所以可以把后续各帧的搜索区域进一步缩小,在以上一帧找到的目标点为中心的小矩形邻域内搜索目标,这样能大大提高后续各帧的匹配速度。通过上述方法的改进,第一帧的搜索时间为1秒,后续各帧的搜索时间为400毫秒,可以满足实时检测的要求。
3 亚像素定位
抽油机游梁支点位移检测要求测量精度要达到0.5毫米,而我们的摄像系统所能达到的最大物理精度为1毫米。为了满足测量精度的要求,我们采用基于双三次性插值法的亚像素技术进行目标的精确定位。
插值是用数学方法把图像局部特征细化,增加图像的分辨率。图3表示的是双线性插值,假设利用上面提到的匹配法搜索到的目标点位置是P(309,298),则目标的精确位置肯定在以P(309,298)为中心的邻域内,即图3-a中ABCD矩形框区域。以P为中心以1/5个像素的步长进行插值,图3-b是在ABCD矩形框内插值后的放大图,注意P与其附近的插值点 的对应位置。
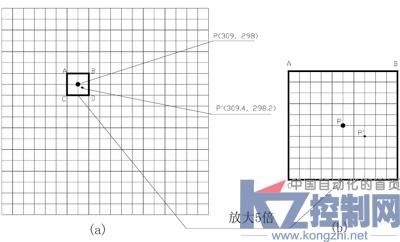
图3 双线性插值示意图(取P'周围2x2个像素点,以1/5个像素的步长插值)
同理,取P'点周围的4×4个像素进行加权平均,即双三次插值。

其中,
S(i,j)表示原来图像上像素点的灰度值,a和b是到最近像素点横向与纵向距离。确定目标点的像素级坐标后,要在目标的邻域16个像素内按照步长1/5像素进行双三次插值,然后再在插值后的区域匹配目标。经过这种插值处理,定位精度可以达到0.2个像素。
4 定标
上述方法测量得到的是以像素为度量单位的位移,而我们关心的是位移的实际“长度”,这就需要进行精确定标,建立图像中像素点与空间物体表面点位置的对应关系。实际位移L与图像中像素点位移P的关系为:
L=α×P,其中α为比例因子。
由于本实验中我们可以严格地把目标点的搜索区域控制在摄像机图像的中央位置,故可以忽略图像的非线性畸变,将实际成像模型视为简单的线性关系。
5 算法分析与实验结果
摄像机获取第一帧抽油机支架顶部视图,大小为502×502像素,根据事先固定在游梁支点位置的标尺进行定标;用鼠标手动选取顶点转轴附近矩形区域作为模板,并在该帧中搜索目标,见图4。实时抓取并处理连续帧序列,处理当前帧时,只需在以上一帧搜索到的目标位置为中心的100×100像素的矩形邻域中进行搜索,可以大大提高匹配速度。

(a) 摄像机实时获取的第一帧抽油机视图 (b) 油梁支点局部放大图
图4 本实验中动态模板选取示例(取矩形框区域为模板)
表1列出了采用本方法所得到10帧抓图的定位结果。从表中数据可知,游梁支点横向最大位移为215.6-211.2=4.4像素;纵向最大位移为182.2-179.2=3.0像素。
由于定标结果得到比例因子α=0.67,即图像中一个像素间距相当于实际位移0.67毫米。所以游梁支点横向最大位移为4.4×α=2.9毫米;纵向最大位移为3.0×α=2.0毫米。横向、纵向位移均在5毫米误差允许范围内,故该抽油机游梁支点位移符合要求。
表1 匹配点横向及纵向坐标

6 结束语
本文研究了模板和图像匹配中的亚像素精确定位方法。匹配时先在整个源图像中对目标进行金字塔式搜索,得到目标的大体范围,后续序列则在目标邻域附近小范围内搜索目标,大大提高了运算速度。采用双三次插值法进行亚像素定位大大提高匹配精度。实验结果验证了此方法的可行性。
其他作者:蒋徐标(1979-),男,浙江上虞人,硕士,中级职称,仪控工程师,现就职于中海油研究总院。
参考文献:
[1] 于起峰, 陆宏伟, 刘肖琳. 基于图像的精密测量与运动测量[M]. 北京: 科学出版社, 2002.
[2] 沈庭芝, 方子文. 数字图像处理及模式识别[M]. 北京: 北京理工大学出版社, 1998.
[3] 孔丹, 李介谷. 亚像元精度的图像匹配技术[J]. 红外与激光工程, 1998,27(1): 29-32.
摘自《自动化博览》2010年第十一期

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号